



ロボットのニュースrobot news
もっと見る
全長4.4ミリの「極小手術ロボット」を開発、5つの機能あり【動画】

超リアルな「ロボット・アロワナ」が、お世話不要の高級魚水槽を実現【動画あり】

【集団の知能】掘削や建設を行う「アリ型ロボット」を開発
役立つ科学情報
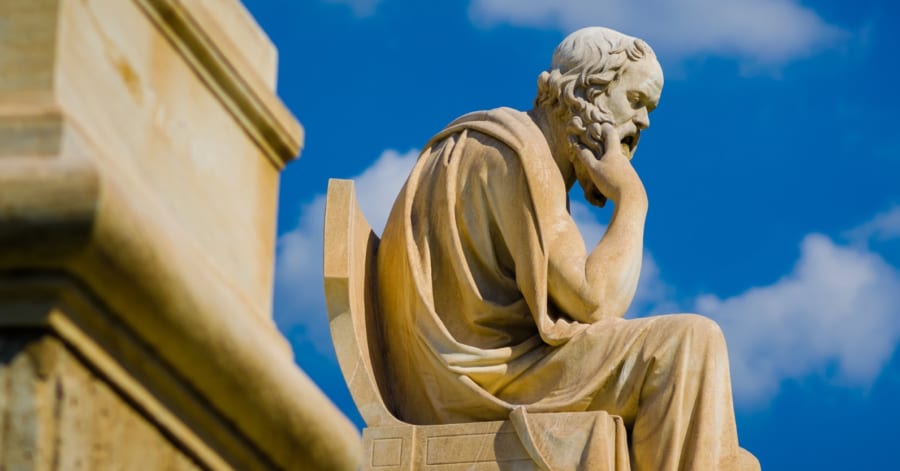
太陽までの距離は紀元前に測定されていた! 必要なのは1本の棒と偉大な頭脳
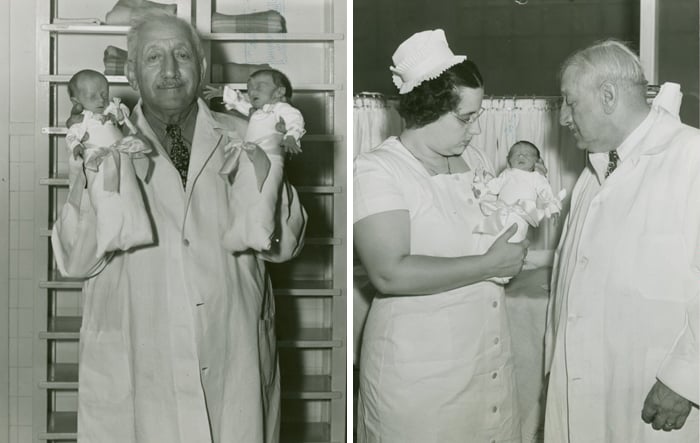
奇跡の実話。死ぬ運命だった6500人の子どもをたった1人で救った「ニセ医者」
注目の科学ニュースpick up !!

死体と交尾するイノシシを発見ーー白骨化するまで「腐敗」を見届ける

「浮気に踏み出しやすい人」の共通点とは

「労働時間を長くしたいのは誰なのか?」東大が調査した結果






