学生チームが開発いた小惑星ジャンプロボット「スペースホッパー」が微小重力実験に成功
地球の衛星である「月」の重力は地球の約6分の1しかありません。
同様に、小惑星や衛星などの比較的小さな天体では重力が小さく、そのような特殊な環境で活躍する探査ロボットが求められています。
様々な企業やグループが、こうした探査ロボットの開発に挑戦していますが、ETHZの学生たちもまた取り組んでいるようです。

2年半前に「学生向け」として始まったこのプロジェクトは、現在でも6名の学生によって継続しており、開発したロボットのテストを行えるまで進展しています。
彼らが開発したロボットは、「スペースホッパー(SpaceHopper)」と名付けられており、シンプルな見た目をしています。
航空宇宙用のアルミニウム合金のボディは三角柱であり、3つのコーナーには、それぞれ1本ずつ足が備わっています。

この足には、それぞれ膝と股関節があり、1つのモーターで膝が動き、さらに別の2つのモーターで股関節が動くようになっています。
つまり、合計9つのモーターが連動してスペースホッパーの足を動かし、小惑星の表面から高くジャンプできるのです。
また空中では、必要に応じて足を伸縮させることで重心を移動させ、ロボットの体勢を維持することができます。
さらに着陸時には、足を曲げながら衝撃を吸収し、転倒してしまわないようコントロールします。
ちなみに、このスペースホッパーにジャンプと3足歩行が採用されているのには理由があります。
小惑星の表面は往々にして凸凹であり、車輪型の探査機では、時に越えられない地形に遭遇するからです。
その点、ジャンプロボットであれば、低重力を生かして大きくジャンプしながら前方に移動したり、大きな障害物を乗り越えたりできます。
さらに、なるべく足の数を減らすことで、機体のサイズと重量を減らすことができます。
以前ETHZは、4本足の小惑星ジャンプロボットを開発したこともありましたが、今回開発されたスペースホッパーでは、3本の足でも小惑星での移動が可能だと考えられています。
こうした軽量化の取り組みにより、スペースホッパーの総重量は5.2kgと非常に軽く、小型の無人宇宙船に搭載して運べるかもしれません。
そしてこのロボットは、2023年の年末に、航空機を用いた微小重力実験でその機能をテストすることができました。
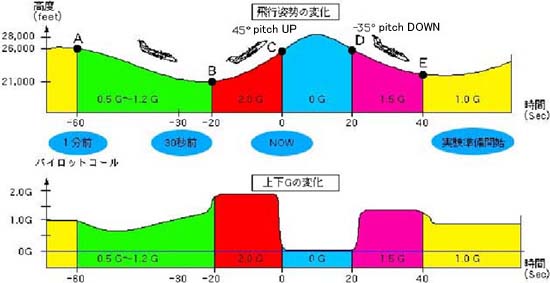
この実験では、旅客機に放物線飛行を行わせ、その内部で短時間の微小重力環境を生み出しています。
その一時的な微小重力環境にて、スペースホッパーは、機体の床から特定の方向にジャンプしたり、足を伸縮させて空中で正しい体勢を保ったりすることができました。
空中で足をジタバタさせている姿は、どこか可愛らしさを感じますね。
今回の微小重力実験は、無事成功に終わったようです。
もちろん、このロボットが実際に小惑星や衛星で活躍するには、さらに多くの課題をこなしていく必要がありますが、もしかしたら将来、3本足のスペースホッパーが小惑星でジャンプしているかもしれません。
























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)