


人間の医師の手を借りない「手術ロボット」の開発
現在の医療現場で使われている手術ロボットは、あくまで「拡張された医師の手」にすぎません。
高精度な動作やミニマルな切開が可能ではあるものの、機械単体では判断も計画もできないのが実情です。
つまり、すべての動作は人間の外科医によって逐一操作され、機械自身は「指示待ち」の存在でした。
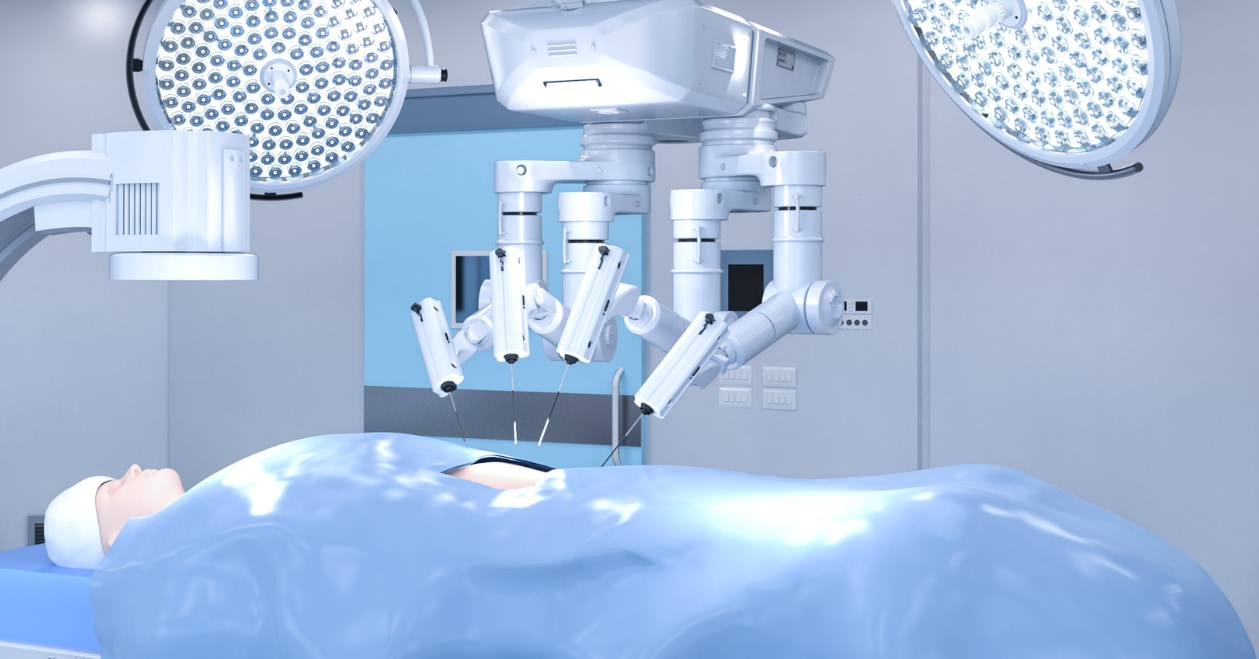
ところが、ジョンズ・ホプキンズ大学のチームが開発したSRT-Hは、自律的に手術を遂行するロボットです。
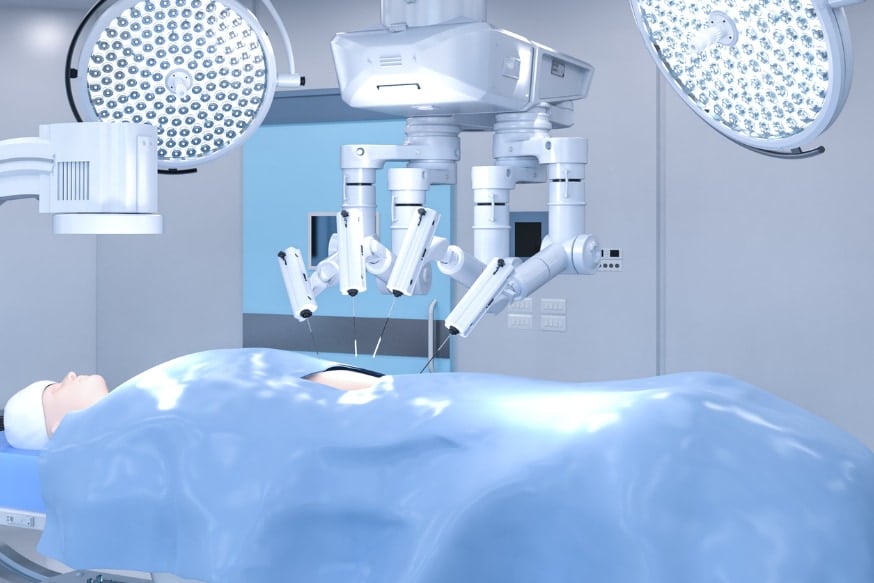
医師の操作を受けることなく、手術中に遭遇する予期せぬ状況にも自ら対応・修正しながら手術を完了する能力を備えています。
このSRT-HはChatGPTのような言語モデルで手術内容を理解しながら、映像ベースの模倣学習によって動作制御もこなせます。
このシステムは、従来の「シナリオ通りにしか動けない手術ロボット」とは一線を画します。
柔軟に状況を把握し、手術の流れを逐次的かつ動的に構成し直すことが可能なのです。
また、トレーニングには実際の手術映像を使った「模倣学習(Imitation Learning)」を活用し、人間の熟練医師の動作や判断をそのまま取り込んでいます。
そして今回、SRT-Hの実力を示すための実験対象となったのは、リアルな人型モデル(人間ではありません)です。
この臓器モデルを用いて、研究チームは胆嚢摘出手術(cholecystectomy)におけるロボットの自律能力を検証しました。
手術には全部で17の工程が含まれており、各ステップでは胆管や動脈の識別、クリップの正確な配置、ハサミによる切除など、高度な操作が求められます。
※次項には実際の手術画像があります。苦手な方はご注意ください。




















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![ピエール ダルジャン フランス 国民 洗剤 多目的 洗浄剤 ラベンダーの香り 300g 1個 フランス 国民洗剤 皮膚に優しい 天然成分 多目的洗浄剤 クリーナー剤 お風呂掃除 [並行輸入品]](https://m.media-amazon.com/images/I/51FHSlv-XWL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)