



金魚は屋外での「運転」もできる
本研究の目的は、金魚が、学習したナビゲーションスキルを利用して、乗り物を操作して移動することが可能かを知ることでした。
乗り物を利用して目的の場所へ移動するという研究は、すでにマウスは実行できるということが確認されていますが、陸とはまるで異なる環境で暮らす魚類に可能なのかは不明でした。
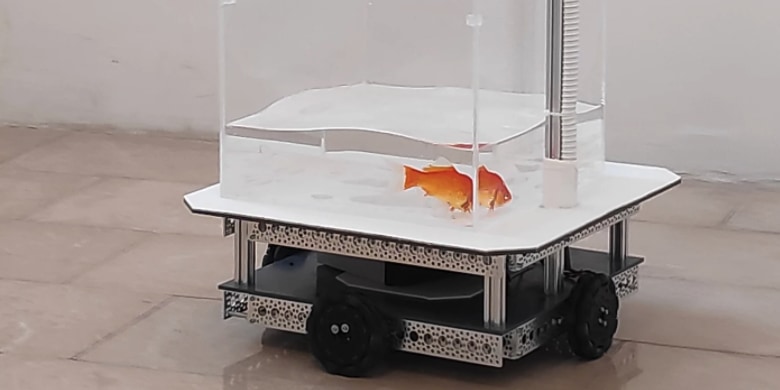
研究チームはまず、実験用のクルマとして「FOV(fish-operated vehicle=金魚が操作する乗り物)」を作成しました。
FOVは、バッテリー駆動の全方位車輪を4つ取り付けた金属製プレートの上に、小型のアクリル製水槽(35×35×28cm)を設置したものです。
また、ポールの上に取り付けたカメラやプロセッサー、LIDARシステムを装備しました。
カメラとLIDARは、水槽内での金魚の位置や体の向き、水槽と周囲の環境との位置関係をリアルタイムで追跡します。
プロセッサーは、それらのデータをもとにFOVをどの方向に動かすかを決定します。
たとえば、金魚が前方に向かって泳ぐとFOVも前進し、水槽の中央に戻ると停止するという仕組みです。
実験では6匹の金魚を用いましたが、すべての個体が数日のうちにこの運転システムの学習に成功しています。
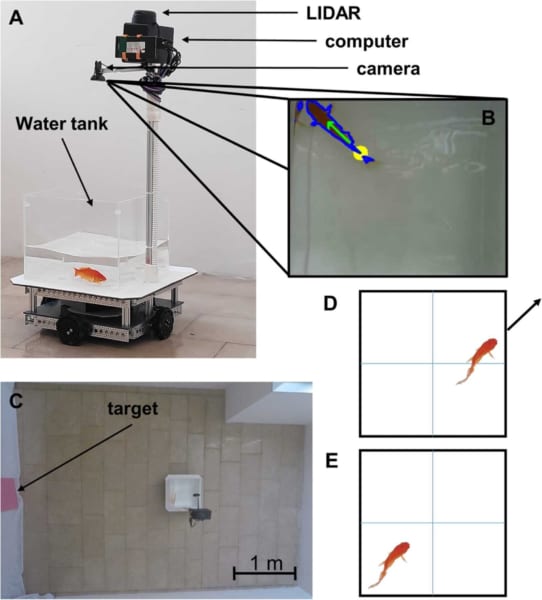
次に研究チームは、金魚の入ったFOVを3×4m四方の囲いの中央に配置。
囲いの一部に目標地点となるピンク色の板を設置し、そこにFOVが到達すると水槽内にエサが放出されるシステムを構築しました。
6匹の金魚には最初に、FOVがピンク色の板の前に来たら、エサが得られることを示します。
その後、FOVを中央に置き、金魚に運転をまかせた結果、彼らはFOVを巧みに操作して、板の前までたどり着くことに成功したのです。
こちらがその様子。
さらにチームは、FOVを屋外に移して、金魚が普段暮らす水中とは大きく異なる環境で実験。
すると金魚は屋外にも問題なく適応し、FOVを目的の場所まで運転できることを実証したのです。
I am excited to share a new study led by Shachar Givon & @MatanSamina w/ Ohad Ben Shahar: Goldfish can learn to navigate a small robotic vehicle on land. We trained goldfish to drive a wheeled platform that reacts to the fish’s movement (https://t.co/ZR59Hu9sib). pic.twitter.com/J5BkuGlZ34
— Ronen Segev (@ronen_segev) January 3, 2022
ある種の動物は、その種が進化してきた環境の中でしか自らをナビゲートできないと考えるかもしれません。
しかし今回の結果は、金魚がエサを得るためなら、陸上の目標地点に向かって「運転」できることを示しています。
研究主任の一人であるシャハール・ギボン(Shachar Givon)氏は、次のように述べています。
「本研究の成果は、生物のナビゲーション能力が環境に固有というよりも、むしろ普遍的なものであることを示唆しています。
金魚は自分たちが進化してきた水中とはまったく異なる環境でも、複雑なタスクを学習する認知能力を持っているのです」






















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)