イモムシの動きを模倣した薄いソフトロボットが探索に役立つ
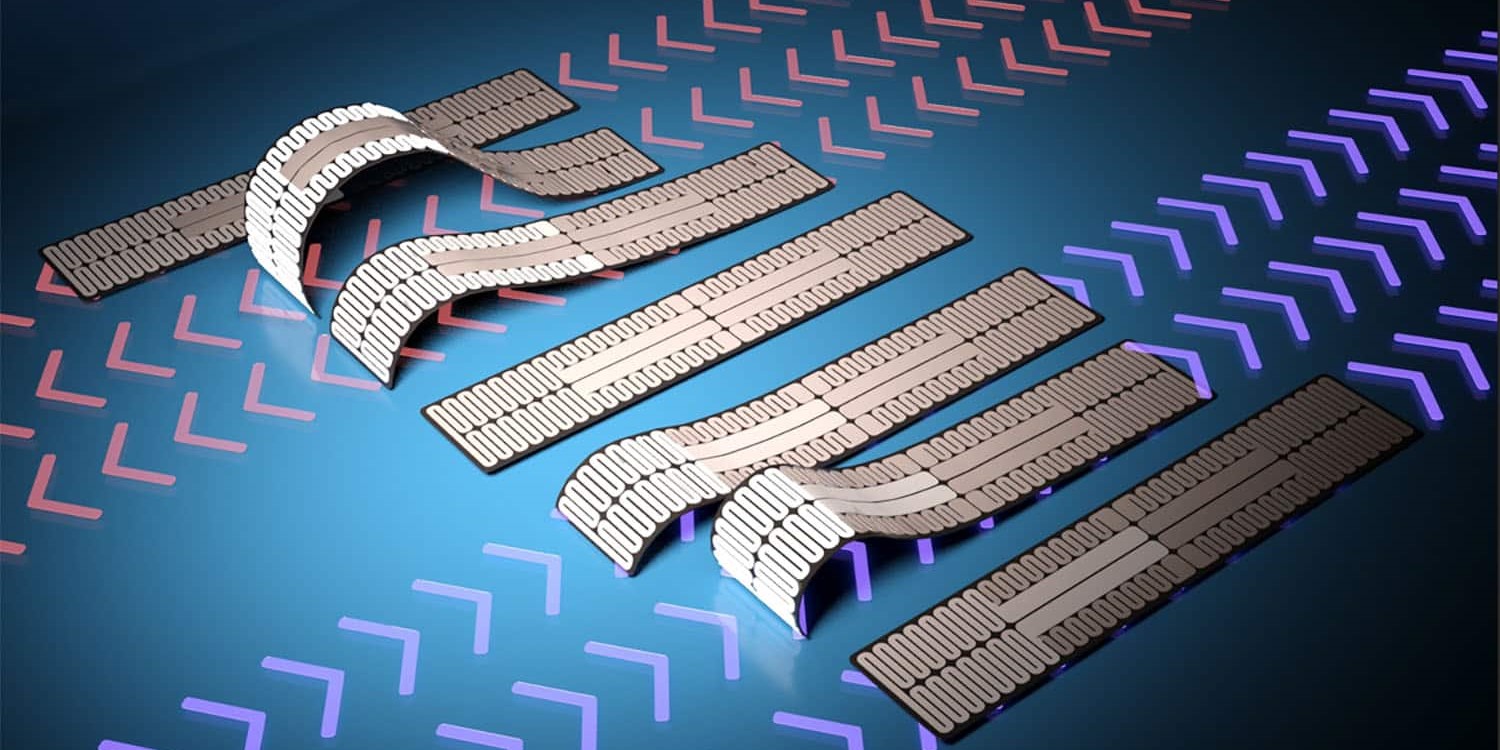
研究チームが開発したソフトロボットは、まるで紙切れのように薄い体を持っています。
この体は異なるポリマーの2つの層で構成されており、加熱によって上部が膨張し、下部が収縮するようになっています。
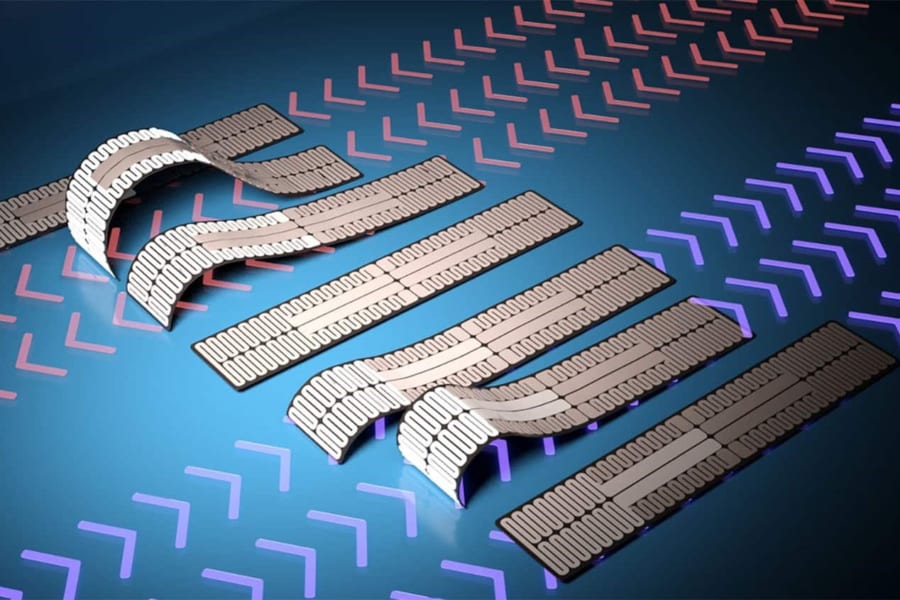
また最上層には銀のナノワイヤーが埋め込まれています。
特定の部位のナノワイヤーに電気を流すことで、その周辺のポリマーが加熱されてカーブを作ります。
そしてチームは複数の部位に対して順番に電気を流すことで、イモムシのような柔らかい動きを生み出すことに成功しました。
イモムシは前進と後退の両方で体の後部を曲げていますが、カーブの大きさや作り方はそれぞれ異なります。
前進では曲がる部位が少なくやや小さめのカーブを作るのに対し、後退では体の半分近くを曲げて大きなカーブを作るのです。
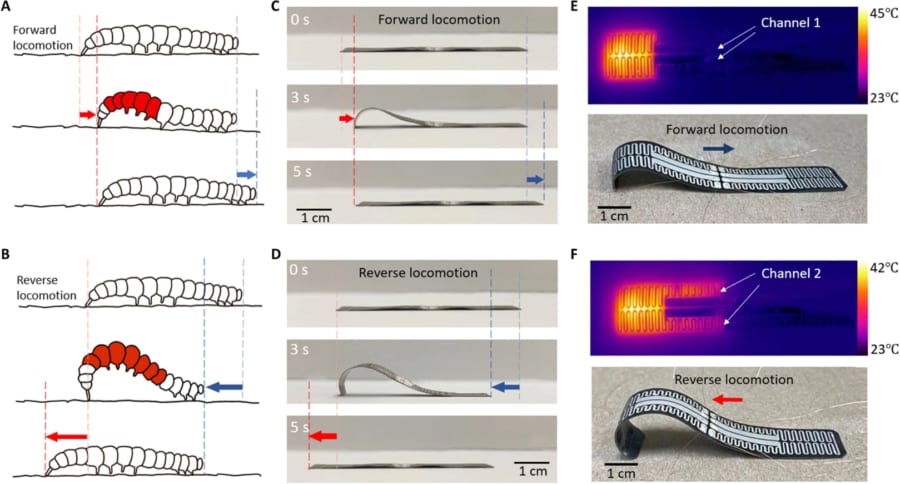
研究チームが開発したソフトロボットでも、イモムシの前進と後退の両方のカーブを模倣し、どちらの方向にも移動できるようにしました。
前身の速度は0.5mm/s、後退の速度は0.72mm/sです。
ちなみにロボットには頭などなく、そもそも前も後ろもありません。
そのため、体の前部と後部の両方で「体を小さく使う前進」と「体を大きく使う後退」の動きが可能であり、環境に応じて効率よく使い分けることができます。
またチームによると、このソフトロボットを上手に動かすコツは、「電流のコントロールにある」ようです。
ソフトロボットは、体の各部が「加熱によるカーブ作成」と「冷却による弛緩」を繰り返すことで移動します。
そのため、移動速度を上げるためには、単に熱量を大きくすればよいわけではなく、電流をコントロールして加熱と冷却の適度なサイクルを生み出すことが大切だったのです。
加えて、ソフトロボットは3mm以下の極薄な体を持っており、高さが限られたスペースにも難なく入っていけます。

テストでは、幅14mm、長さ70mmのソフトロボットが、障害物によって生じた高さ3mm、距離30mmの隙間(トンネル)を通過することに成功しました。
この高さでは、隙間の下に入った状態で身動きすることはできませんが、このロボットは隙間の外にある部位を器用に動かして移動し続けることができました。
このソフトロボットを利用するなら、これまで人間が入れなかった場所を探索することができます。
仮に3mmの隙間しかなかったり、方向転換するスペースがなかったりしても、イモムシのように前進と後進を使い分けて進入・退出できるのです。
研究チームは、次の段階として、捜索救助用のデバイスをソフトロボットに統合する方法を探っています。




























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)