シンカイクサウオを参考にした柔らかい深海調査ロボット
彼らの骨はゲル状の柔らかい体に細かく分布していて、圧力を均等に分散させています。また、頭蓋骨は完全に硬化して閉じておらず、外圧と内圧が釣り合っています。
そこで、チームはこれをマネて、電子部品のそれぞれの距離を離し、プリント回路基盤からも分離、部品を分散させて柔らかいシリコンで包むことにしました。
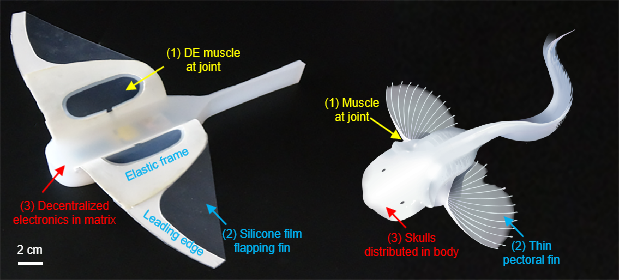
これによって、部品が一緒に圧迫されるのを防ぎ、硬質な殻で保護することなく高圧環境に適応できるようになりました。
ロボットの推進力は、2枚のヒレを羽ばたかせることで生まれます。
このヒレは、人工筋肉を取り巻く海水を負電極として利用し、人工筋肉の内外で生じる電位差によって、高分子膜が伸縮して動いています。
こうして設計されたソフトロボットは、南シナ海で実際に運用テストを行い、水深3224メートルの深海で自由に泳ぐことに成功しました。
また、マリアナ海溝の水深1万900メートルのフィールドテストでも、無事に動作することを確認できたと報告されています(マリアナ海溝ではアームで支えた状態でのテスト)。
このユニークなロボットが、私たちのまだ見ぬマリアナ海溝の深部を明らかにする日は近いかもしれません。