



深海の圧力に耐えるロボット

深海はその上にある全ての水から圧力を受けるため、海面大気圧の約1000倍の圧力がかかります。
マリアナ海溝で、もっとも深い場所とされるチャレンジャーディープの底は、海面下1万900メートルにあり、ここでかかる圧力は約1億300万パスカルです。
これは指先ほどの面積に、ゾウが立っているのと同じくらいの圧力がかかるという状態です。
そんな超深海層(深度6000~1万1000メートルの海洋地帯)の調査は、技術的にも非常に困難な課題となっています。
通常、こうした深海調査のロボットや有人潜水艇は、強靭な剛性金属フレームの耐圧殻を使って設計されています。
しかし、こうした船は非常にかさばる機材であり、扱いにくく、構造破損のリスクが常につきまといます。
強力な水圧に無理に耐えようとしても、どうにも限界がありそうです。
そこで注目されているのが、ソフトロボティクスを用いた新海調査船の開発です。
ソフトロボティクスは、生物の動きや、環境適応の方法を参考にして、硬い材料を用いずに、柔らかい材料を積極的に使って新しい機能のロボット構築を目指す分野です。
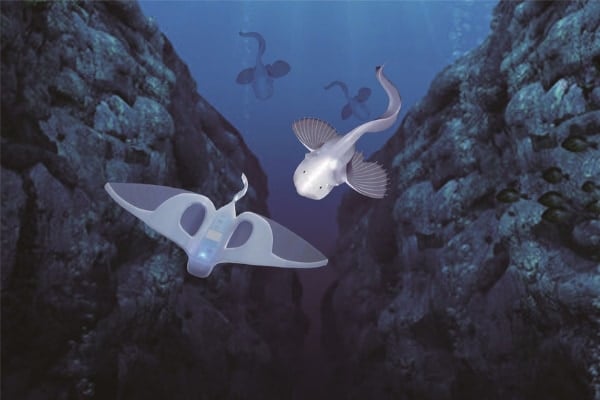
この研究で中国の浙江大学(せっこうだいがく)のチームが着目したのが、深海生物のシンカイクサウオでした。

シンカイクサウオは、マリアナ海溝に生息する魚で、水深約7000メートル以下の非常に高い静水圧の環境で発見されています。
彼らはそんな世界でも有数の過酷な環境下で、優雅に泳ぎ回っています。
実際の魚などをマネて泳ぐソフトロボットというものは、以前からいろいろ研究されていましたが、深海調査用のロボットは話が異なります。
深海調査では、水の化学的性質の調査、照明を使った撮影、サンプルの収集などさまざまなタスクが課されるため、そのための電子機器を搭載する必要があります。
これらの機器は当然、強力な水圧を受ければ互いに押し合って粉砕してしまいます。
ここで参考になったのが、シンカイクサウオの骨格でした。