1台のカメラで操作可能!Youtube動画でシステム学習
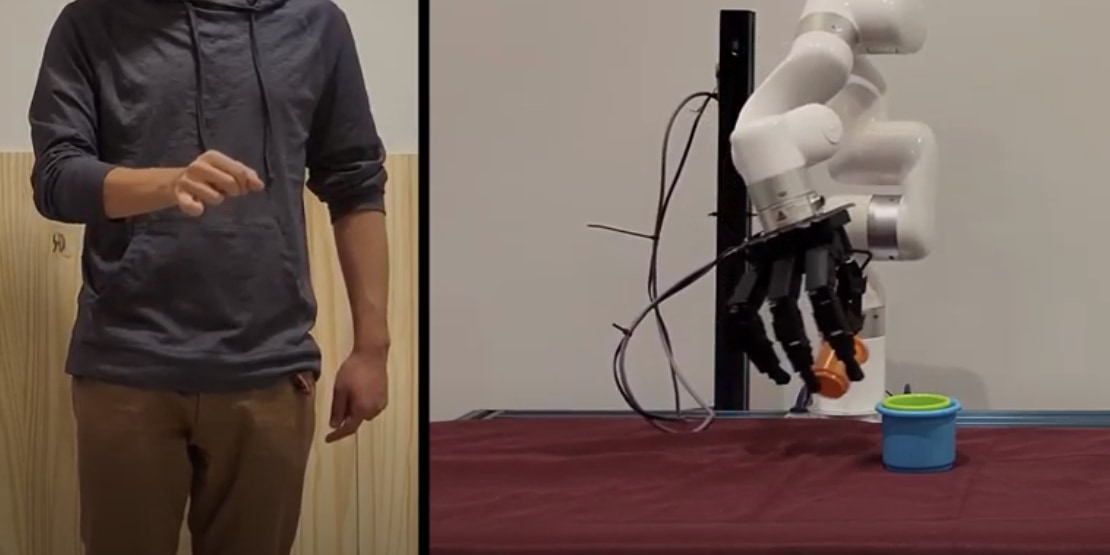
研究チームが開発した新しい操作システムでは、1台のカメラで人の手とロボットアームを同期させることが可能。
特殊なグローブを装着したり、カメラを細かくセッティングしたりする必要はありません。
カメラの前であれば、ユーザーがどこに立っていても問題はなく、ただ自分の腕と指をいつものように動かすだけなのです。
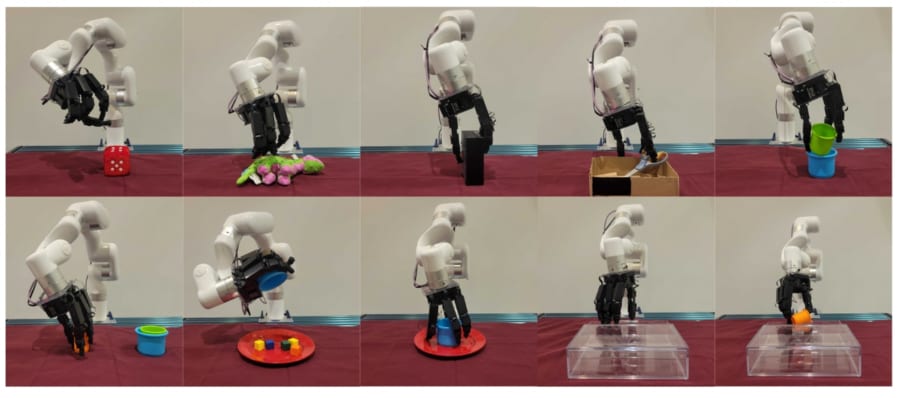
動画から分かるように、ロボットアームはしっかりとユーザーの手の動きを反映して、モノをつかんだり離したりできていますね。
ケースの引き出しをスライドさせて、中の物を取り出すといった複雑な作業も可能とのこと。
この操作システムの斬新な特徴は、「操作と設備がシンプル」なだけではありません。
非常に簡単なシステム学習法を採用しているのです。
今回の操作システムでは、カメラに映る手の2次元画像を分析することで、ロボットアームが行うべき3次元の動きを導き出しています。
ところが人間とロボットの手では、形状・サイズ・構造が異なるので、1枚の画像だけでは上手に変換できません。
膨大な数の「人の手」の画像を分析し、システムに学習させなければいけないのです。

研究チームは、高いコストをかけてそれら画像データを地道に集めるのではなく、YouTubeの動画を利用することにしました。
YouTubeにアップされているさまざまな「手の動画」でシステム学習させたのです。
実際、この方法により訓練されたシステムは、人間の手の動きを忠実に 再現できました。
この実例は、インターネットにあふれている共有動画の用い方について、新たな道を開くものとなるでしょう。
さて、今回開発されたロボットアーム操作システムは、「操作」の敷居を大きく下げるものとなりました。
さらに研究が進み、実用化できるなら、専門家ではない一般人が、カメラ1台をつかって世界中のどこからでもリモート操作できるようになるでしょう。





















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)