


「電子回路やバッテリーが必要ない」というメリット、応用に期待
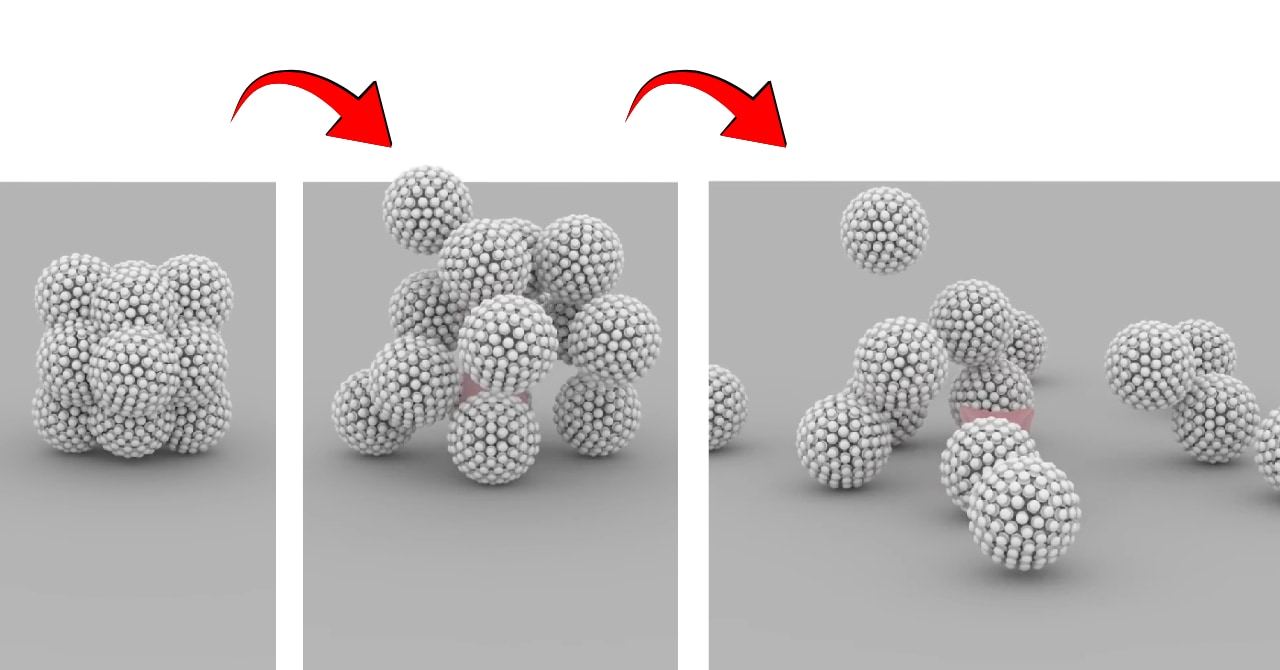
このロボットの大きな利点は、電子回路やバッテリーに頼らないことです。
普通のロボットは高性能になるほど、センサーや制御装置、電源など多くの部品が必要になります。
しかし今回の仕組みでは、粒子そのものの形と接触だけで振る舞いが決まるため、構造を極めて単純にできます。
この単純さは、弱点ではなく強みになりえます。
特に注目されるのは、小型化しやすい点です。
電子部品を積み込む必要がないなら、粒子をもっと小さなスケールにしていく余地があります。
研究チームは、この考え方を将来的には微小な粒子ロボットへ広げられる可能性があると見ています。
たとえば、さらに小型化できれば血管内に送り込み、超音波のような振動で広げて、通常の機器では届きにくい場所にアクセスするといった応用が可能です。
がん治療薬を狙った場所に届けたり、細い血管の構造を調べたりするのに役立つかもしれません。
応用先は医療だけではありません。
たとえば宇宙空間のように、放射線や極端な温度変化が電子機器にとって厳しい環境では、電子回路に頼らない仕組みそのものが強みになります。
粒子を小さくまとめて運び、必要な場所で振動を与えて一斉に展開することができれば、探査や簡単な作業、障害物を避けながらの拡散などに利用できる可能性があります。
また、この研究はロボット工学だけでなく、「材料」の考え方にもつながっています。
形を工夫することで、くっつく、離れる、広がるといった振る舞いを材料側に持たせられるなら、将来的には条件に応じて自ら形を変える構造物や、刺激に応じて分散する素材といった方向にも発展するかもしれません。
もちろん、課題もあります。
このロボットは、従来のロボットのように複雑な判断をしたり、精密な作業をしたりするのは得意ではありません。
外部からの振動という比較的単純な刺激に応じて動く仕組みなので、「何でもできる万能ロボット」ではないのです。
しかし逆に言えば、入り込みやすい、広がりやすい、そして電子回路に頼らないという点では、これまでのロボットにない個性を持っています。
今回の研究は、ロボットをより賢くするのではなく、「賢さを別の場所に移す」という発想を実現させた点で大きな価値を持っています。
確かに、ロボットとは、センサーや電池やコンピューターを備えた機械のことだと私たちは思いがちです。
しかし今回の研究は、その常識を少し揺さぶります。
未来のロボットの中には、形だけで動き出す「仕組み」や、それらが複雑に組み合わさったものも含まれるのかもしれません。























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)



![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)























福岡伸一の生物と無生物のあいだのウイルスを思い出しました
天然のウイルスもまるでマシーンみたいだって
医療用以外の使い道は夢があるね
ロボットと呼べるためには、その機械自体にある程度の判断能力が備わっている必要がありますが、さすがにこの記事の粒子程度の判断能力のレベルではロボットとは呼べないでしょう。
この程度のものをロボットと呼ぶのなら、「人感センサーライト」や「簡易水洗トイレのバネ式便皿」ですらロボットという事になってしまいます。
自己判断はロボットの条件ではないかと。
工場のロボットアームは挙動を外部(人間)から入力されて、それに従うだけなのだから。
>挙動を外部(人間)から入力されて、それに従うだけ
なのはNC旋盤でもやっている事であり、NC旋盤はロボットとは呼ばれませんから、
>挙動を外部(人間)から入力されて、それに従うだけ
のタイプのロボットアームは名前の中にロボットという言葉が入っているだけであって、その実態は単なる工作機械に過ぎないため、ロボットとは言えません。
尚、そのようなタイプのロボットアームはかなり古いタイプであり、ロボットアーム等の産業用ロボットは結構前から画像認識によって位置決め等を自ら判断し、自動的に変更調整するようになっていますから、
>工場のロボットアームは挙動を外部(人間)から入力されて、それに従うだけ
というのは時代遅れの誤った考えです。
>>ロボットアームは挙動を外部(人間)から入力されて、それに従うだけなのだから~
その考えですと、”「ロボットには電子的な頭脳がある」という常識をひっくり返している”という記事冒頭の記述と矛盾が生じるのではないでしょうか。
もちろんロボットアームもロボットだとは思いますが、この記事では「ロボット=頭脳があるもの」と定義してしまっているから、ややこしくなっている。
そしてやはりその観点で言うと、私も枝主の方と同じで、これが頭脳があって自発的に動けるロボットだとは思えないですかねえ。
元コメのコメ主です。
>その考えですと、”「ロボットには電子的な頭脳がある」という常識をひっくり返している”という記事冒頭の記述と矛盾が生じるのではないでしょうか。
「ゲスト 2026/04/09 14:05:49」の味方をするわけではありませんが、どこが矛盾していると仰るのでしょうか?
>「ロボットには電子的な頭脳がある」
という文の意味は「全てのロボットには電子的な頭脳がある」という意味でしかなく、「電子的な頭脳を持っているものをロボットと呼ぶ」などとは記事の何処にも書かれていませんよ。
つまり、「『電子頭脳を持っているもの』の一部に『ロボット』と呼ばれるもののグループ全体が含まれているだけであって、『電子頭脳を持っているもの』の中にはロボット以外のものもある」という事です。
尚、間違えてはいけないのは、
>「ロボットには電子的な頭脳がある」という常識
というのは、あくまで記事を書いた記者が「常識」と主張しているだけという事に過ぎず、必ずしも万人に共通した常識というわけではないという点と、常識はあくまで常識に過ぎず、定義などではないため必ずしも正しいとは限らないという点です。
例えば「人型でなければロボットではない」と考えている人もいるかも知れません。
また、SFでは電子頭脳の代わりにバイオコンピューターを備えたロボットが登場する作品もありますし、現実の技術でも電子頭脳ではなくリレー回路を使って簡単な判断能力を持ち、人間の交換手の代わりに働く電話交換機も実在していましたし、技術的には電子頭脳の代わりに流体素子を使って判断する機械を造る事も不可能ではありませんから、
>「ロボットには電子的な頭脳がある」
という考えは、そもそも間違っていますし、常識でもありません。
もうちょっとロボロボしてくれない?
百歩ゆずって「ぶれいばーん」とかは
パイロットが操縦していても自己判断や自動操縦
できているからロボットでいいけど
なんで「〇〇〇ジャー」の合体したやつとか
「がんだむ」とかパイロットが操縦した信号に
追従して動作しているだけのただの人型戦闘機械
なのにロボットって呼べるの?
なんかすごい気がするけど似たようなものを
どこかで見たことある気がする。
ロボットと言うか動く機械という気がするが…
帆船とか?おもちゃのような感じだね