


脳を持たない「形で考える」ロボットを開発
今回の研究で最も面白いのは、「ロボットには電子的な頭脳がある」という常識をひっくり返している点です。
普通のロボットは、センサーで周囲の情報を集め、コンピューターで判断し、プログラムに従って動きます。
つまり、ロボットの知能は電子回路の中にあります。
しかし今回のロボットは違います。
情報処理を担うのは電子部品ではなく、粒子どうしの接触と形状です。
それぞれの粒子ロボットは円形の本体を持ち、その周囲には等間隔で、しなる触手のようなアームが配置されています。
このアームが別の粒子に触れると、曲がりながら互いに引っかかり、ロック状態になります。
このときアームはバネのように変形しており、内部には弾性エネルギーが蓄えられています。
ここまでは、いわば「くっつく仕組み」です。
では、どうやって離れるのでしょうか。
そのきっかけになるのが外部から与える振動です。
研究チームが粒子を載せた台に小さな振動を加えると、粒子はすぐに離れるのではなく、まずはロックしたまま小さな衝突を何度も繰り返します。
この微小な衝突が積み重なることで、触手どうしの接触状態が少しずつ変わり、ある瞬間にロックが一気に解除されます。
すると、触手に蓄えられていたエネルギーが運動エネルギーに変わり、粒子どうしが勢いよく反発して離れていきます。
重要なのは、この一連の動きが「考えて決めた結果」ではなく、「形と力学の結果」として生じていることです。
つまり、このロボットは命令を計算しているのではなく、構造そのものが答えを出しているのです。
研究チームはこの考え方を「mechanical intelligence(機械的な知能)」と表現しています。
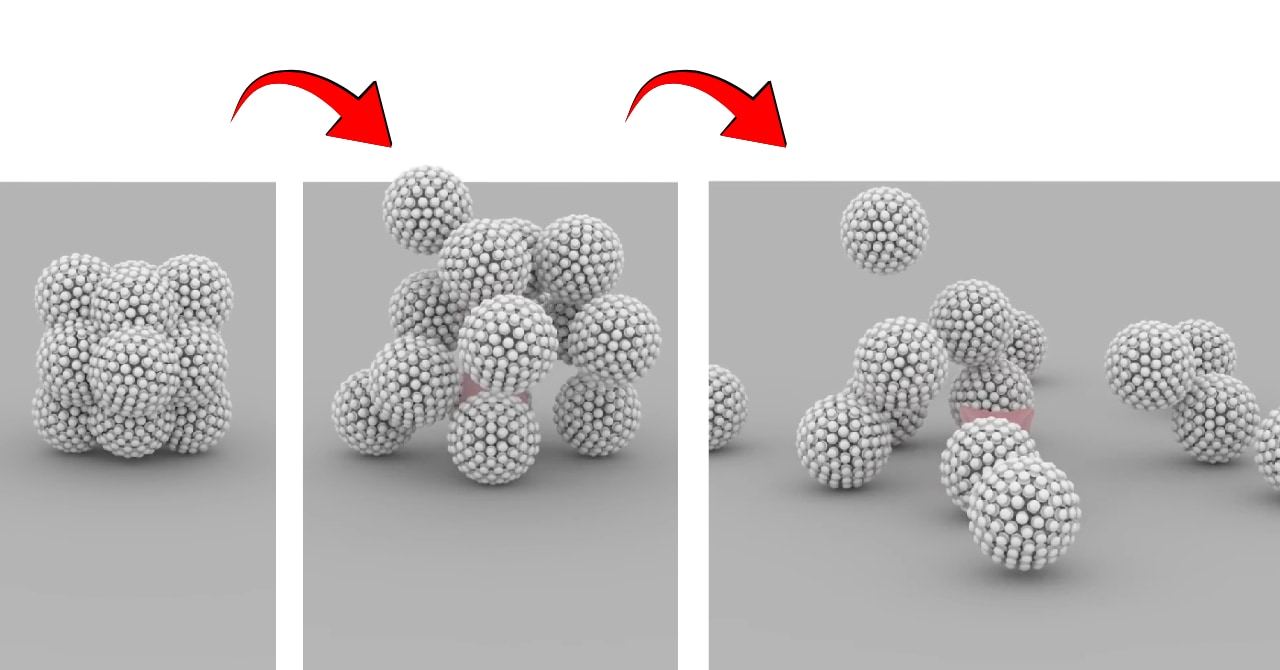
さらに面白いのは、粒子が2個ではなく多数集まると、振る舞いが一気に複雑になることです。
粒子が互いにロックして塊を作る状態もあれば、振動によって一斉にほどけて周囲に広がる状態もあります。
実際、粒子群が分離した状態から固まった状態になり、そこから再び一斉に拡散する様子が示されており、まるで物質が液体や固体や気体のように姿を変えるようにも見えます。
しかも、この振る舞いは偶然ではありません。
触手の先端の形を少し変えるだけで、ロックの強さや外れやすさ、離れるときに放出されるエネルギーが変わります。
たとえば、しっかり噛み合う形なら外れにくくなり、外れやすい形ならより弱い振動でも離れやすくなります。
この違いを利用すると、どの粒子群が先にほどけるか、どの段階で広がるかといった挙動を設計できます。
また、ロボットの構造によっては、特定の方向に移動することも可能です。
こうした点が、従来のロボットとの決定的な違いです。
普通のロボットは、ソフトウェアを書き換えることで行動を変えます。
一方で今回のロボットは、形を変えることで行動が変わります。
言い換えれば、プログラムの代わりを形の設計が担っているのです。
そのため、これは「ロボット」というより、「動く仕組みそのもの」に近い存在だと言えるかもしれません。
では、これらのロボット群はどんな可能性を秘めているのでしょうか。




















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)



![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)