


アリのように集団で建設するロボット「RAnt」
アリやシロアリが集団で構造物を作る仕組みは、これまでの研究である程度解明されています。
その中核にあるのが「スティグマジー」と呼ばれる仕組みです。
これは、個体が環境に変化を残し、その変化に他の個体が反応することで、間接的に協調が生まれるというものです。
アリの場合はフェロモンがその役割を担っています。
今回の研究は、この既知の原理をロボットで再現し、実際にどのような集団行動が生まれるのかを検証したものです。
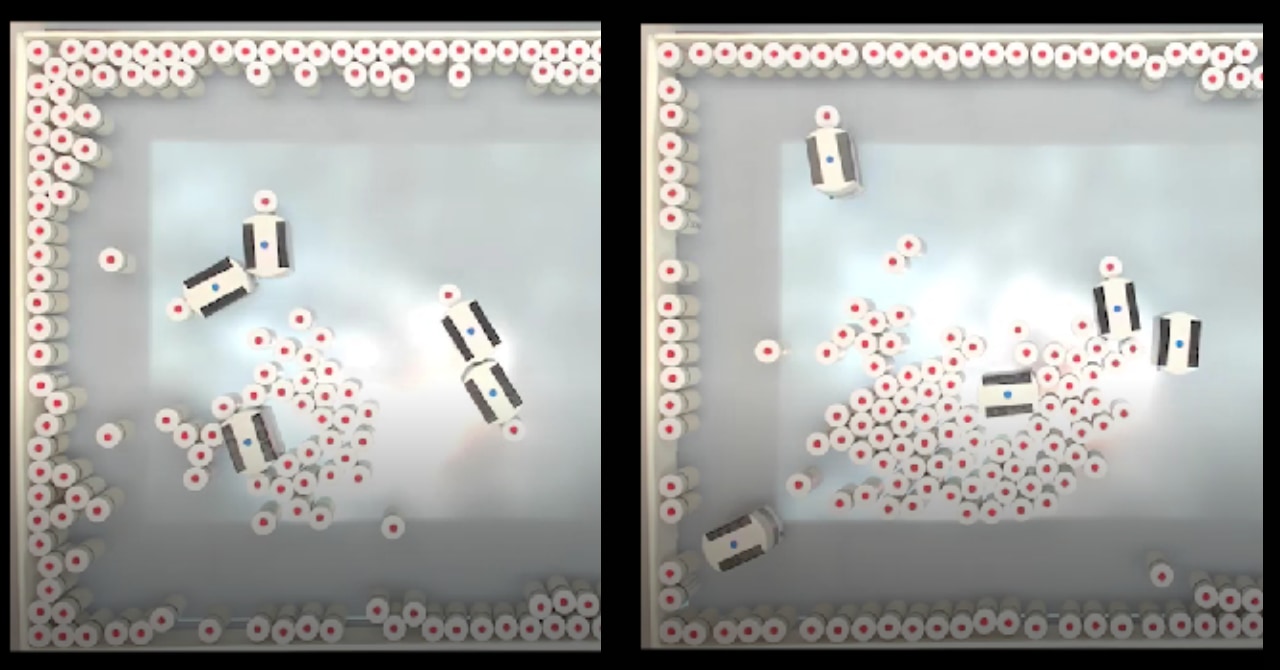
研究チームが開発した「RAnt(ロボティック・アント)」は、非常に単純な機能しか持っていません。
まず、ロボットが移動した場所には、「フォトルモン(photormone)」と呼ばれる光の信号が実験装置によって投影されます。
これはアリのフェロモンのような“行動の痕跡”を光で再現したものです。
次に、ロボットはこの光の強さの違いをセンサーで検知し、より強い方向へ進むように動きます。
さらに、ロボットは小さなブロックを拾って運び、周囲の光信号が決められた条件を満たすと、ブロックを離します。
重要なのは、ロボット同士が直接通信していない点であり、行動の調整はすべて環境を介して行われます。
つまり、ロボットが残した信号が次のロボットの行動を変え、その結果がさらに環境を変えていくという循環が生まれます。
このような単純なルールにもかかわらず、興味深い現象が観察されました。
ロボットが偶然同じ場所に集まると、その場所のフォトルモンが強まります。
すると、その場所はさらにロボットを引き寄せやすくなり、集まりが加速。
やがてロボットはその場の信号に強く影響され、同じ場所を周回するようになります。
そのようにしてロボットが局所的に集中すると、そこが構造形成の起点になります。
そこにブロックが運び込まれることで、特定の場所に材料が集まり、自然に構造が形成されていくのです。
つまり、材料の集積や構造形成は、あらかじめ設計図を与えられて起きたものではなく、ロボットと環境の相互作用から自発的に現れたのです。
では、これらRAntの振る舞いは、どのように制御できるのでしょうか。






















![[コロニル] ウォーターストップカラーズ 75ml メンズ ブラウン Free](https://m.media-amazon.com/images/I/41Jh7ZSFd-L._SL500_.jpg)