


2つのパラメータだけで「建設」と「掘削」を切り替える
この研究のもう一つの重要な成果は、集団の振る舞いを非常に少ないパラメータで制御できることを示した点です。
研究チームは、ロボットの行動を決める要素として主に2つのパラメータに注目しました。
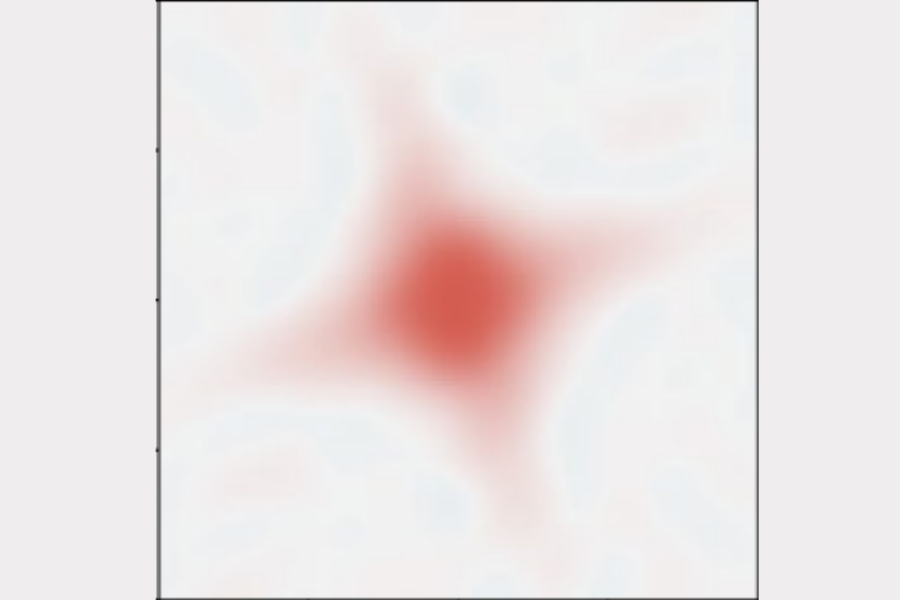
1つは「協力度(cooperation strength)」で、ロボットがフォトルモンの強い方向にどれだけ引き寄せられるかを表します。
もう1つは「材料を置く/取り除く傾向(deposition rate)」です。
この値の向きを変えると、ロボット群は材料を集める方向にも、取り除く方向にも振る舞います。
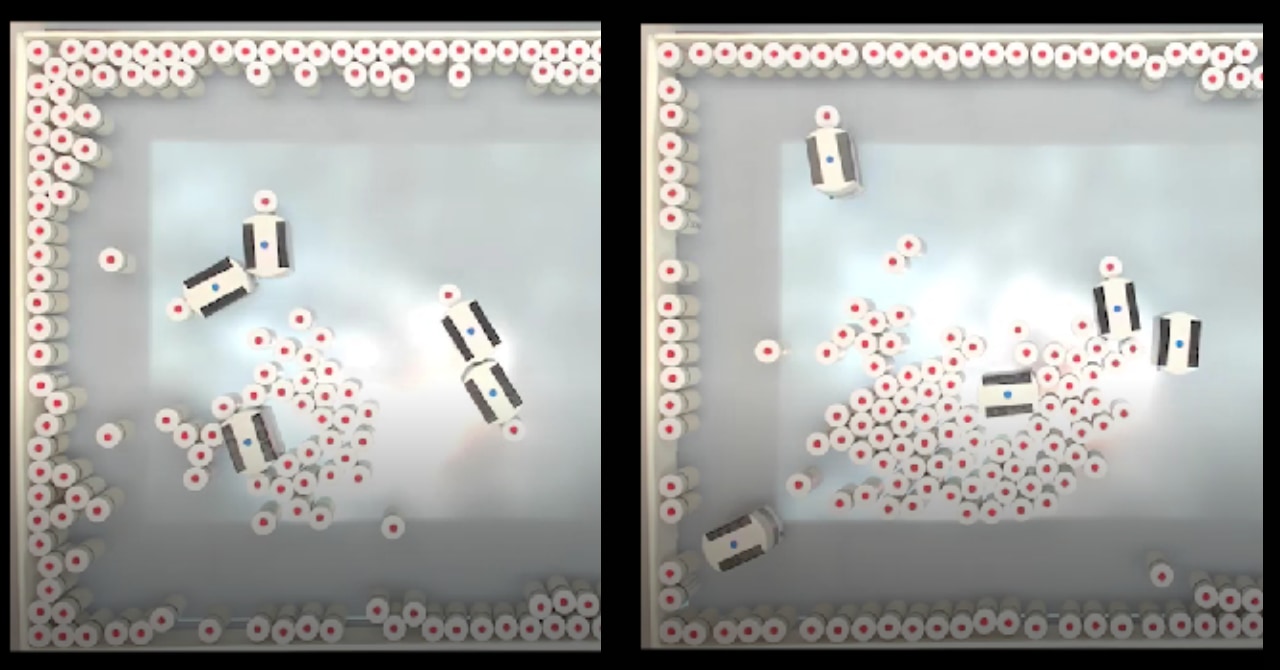
協力度が低い場合、ロボットはほぼランダムに動き、材料は広く分散します。
一方で協力度が高くなると、ロボットは信号の強い場所に集中しやすくなり、特定の場所に材料が集まるようになります。
さらに、材料を扱うルールの向きを変えることで、同じ種類のロボット群が、材料を集める行動にも、取り除く行動にも切り替わることが確認されました。
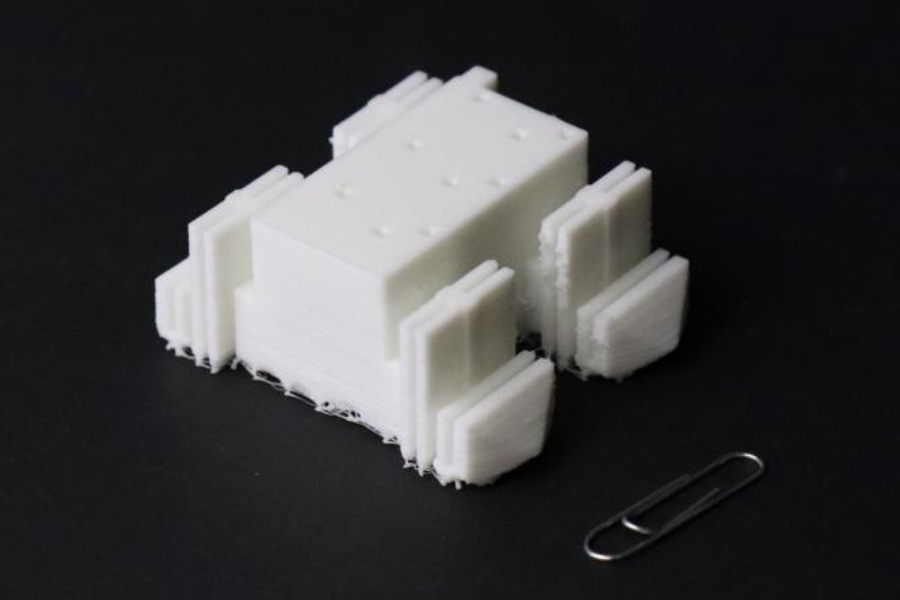
材料を置く方向では、ブロックが集められて構造形成が進みます。
反対に、材料を取り除く方向では、既に並べられたブロックの層を掘り崩すような掘削行動が現れました。
ここで重要なのは、こうした切り替えが、司令塔からの命令ではなく、各ロボットの局所的な判断と環境信号の積み重ねで生じている点です。
個々のロボットは単純なルールに従っているだけですが、環境との相互作用を通じて、集団としては一貫した作業を実現しています。
このように研究では、ロボット同士と周りの環境が影響し合うことで、集団の動きが決まることを示されました。
つまり、賢さはロボット一台の中だけではなく、周りの環境も含めて生まれているということです。
こうした仕組みは、危険な環境での自律的な建設や、月・火星といった地球外でのインフラ整備など、将来的な応用も期待されています。
人間が直接作業できない場所において、単純なロボットの集団が協調して環境を構築する技術は、大きな可能性を秘めていると言えるでしょう。























![よーく聞いてね!3つのヒントで学ぶ!どうぶつカード ([バラエティ])](https://m.media-amazon.com/images/I/51zT3OcliFL._SL500_.jpg)









![BLACK WOLVES SAGA -Weiβ und Schwarz- for Nintendo Switch 【メーカー特典あり】 [予約特典]スリーブケース](https://m.media-amazon.com/images/I/51CzLR9fW3L._SL500_.jpg)














群知能
今は別の装置を使って擬似的な環境信号を投影する必要があるから、真の意味では自律的とは言えず、そのままでは投影装置の無い場所では使えません。
だから危険な環境での自律的な建設や、月・火星といった地球外でのインフラ整備などに使うためには、どうすれば別置きの装置に頼らずに「変化させる事が可能な環境信号」(←光に限らない)を得るのかが課題ですね。