



光をあてると動き回るマリモロボを開発!
これまで人類は、生物の生命活動を利用したさまざまな生体ロボットを開発してきました。
無機的なロボットが電池に依存する一方で、生体ロボットは自然界に存在する酸素や栄養素を利用して活動エネルギーを作り出すことが可能です。
これまでたびたび取り上げてきた、カエルの細胞を利用して作った「ぜノボット」シリーズも、水中の有機物(糖)と酸素をエネルギー源として動いていました。
一方、動物の代わりに植物を利用した生体ロボットの研究も行われていました。
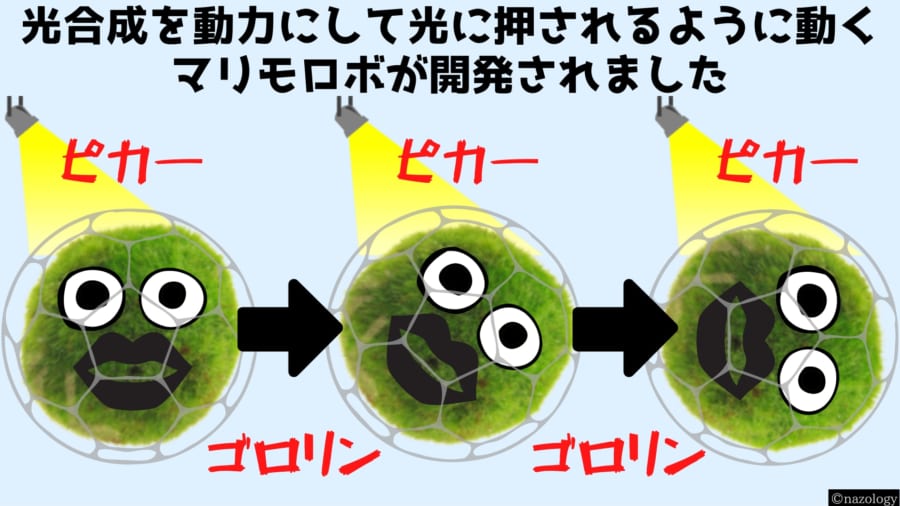
動物の細胞と違い植物は、光をエネルギー源にできるため、より持続的な活動が可能です。
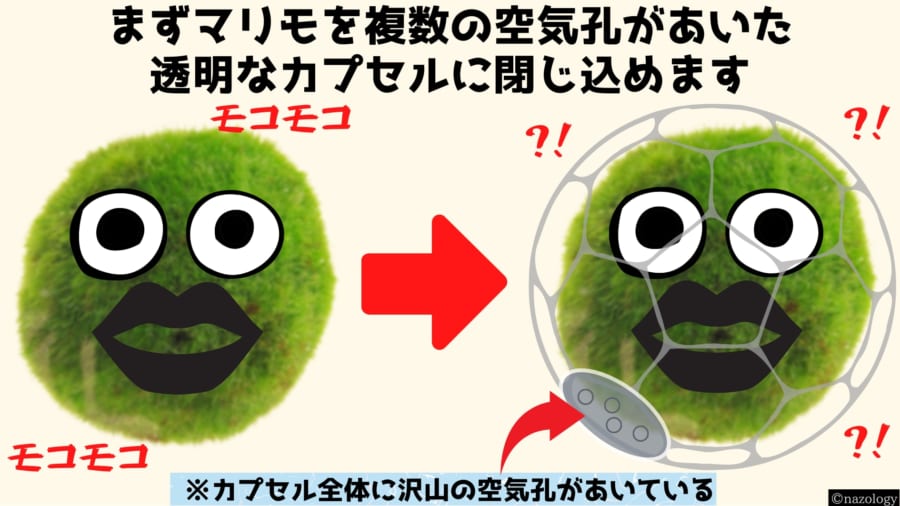
そこで今回、西イングランド大の研究者たちは、マリモを複数の通気孔があいたカプセルに入れることで「生体ロボット」にできると考えました。
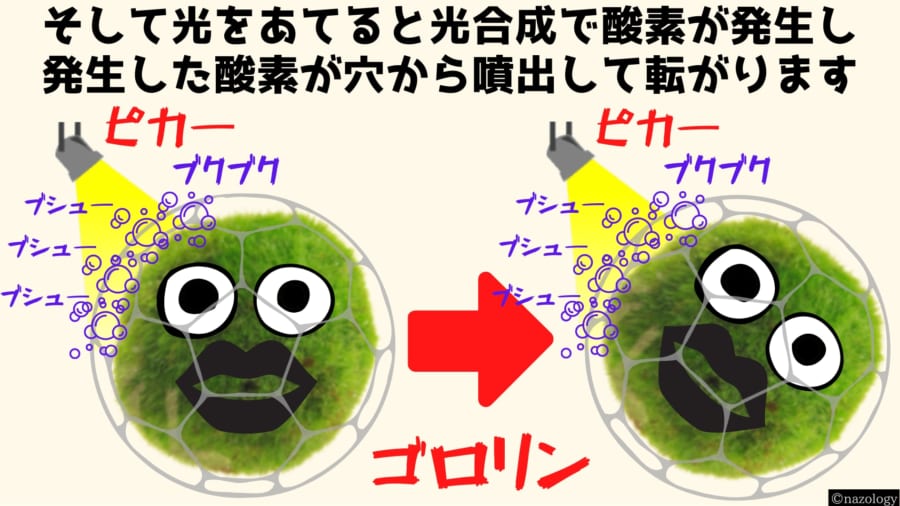
マリモに対して特定の方向から光を照射すると、光があたった部分では光合成によって酸素が生産されます。
通常のマリモの場合、発生した酸素は全方位に向けて拡散してしまいますが、通気孔があいたカプセルにマリモを入れることで、酸素の放出方向にある程度の指向性を与えられると考えたのです。
早速チームは、拾ってきたマリモを即席のカプセルに詰めて光をあててみました。
しかし残念なことに、適当に穴をあけたカプセルでは、全体を効率的に動かすことはできませんでした。
そこでチームは試行錯誤を繰り返し、カプセルの形状を最適なものに作り直していきました。
結果、4番目に設計された「Mk4」において最大時速「30cm」を達成します。
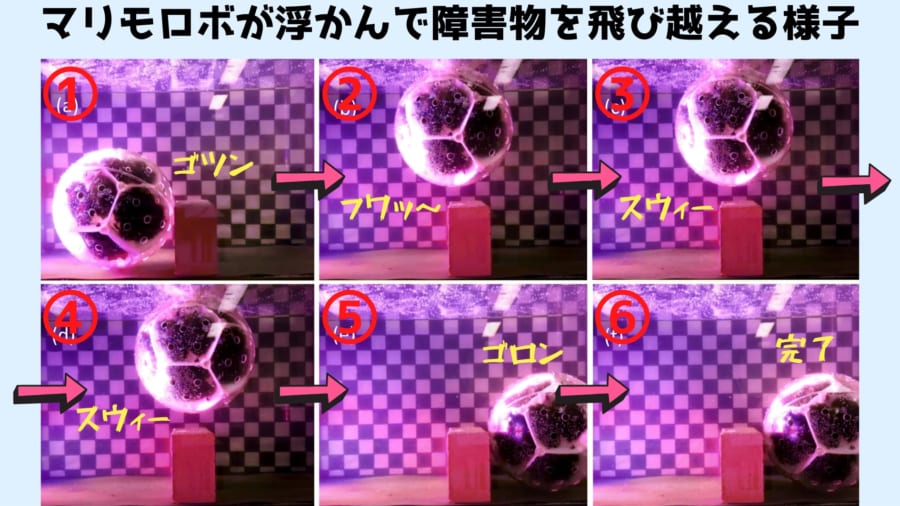
また高さ10cmの壁に対しても、上の図のように、真上から光をあてることでカプセル上部に酸素を蓄積して浮揚し、飛び越えて移動することが可能になりました。
なお、マリモロボの耐久年数は最大で数年に及ぶとのこと。
さらに研究者たちがマリモロボが発するエネルギーの合計値を計算したところ、1年間にわたってアルカリ単三電池と同等のエネルギーを生成できる可能性が示されました。
マリモロボは瞬間的なエネルギー生産能力こそ低いものの、既存の生体ロボットに比べてはるかに長時間、活動し続けることが可能なようです。
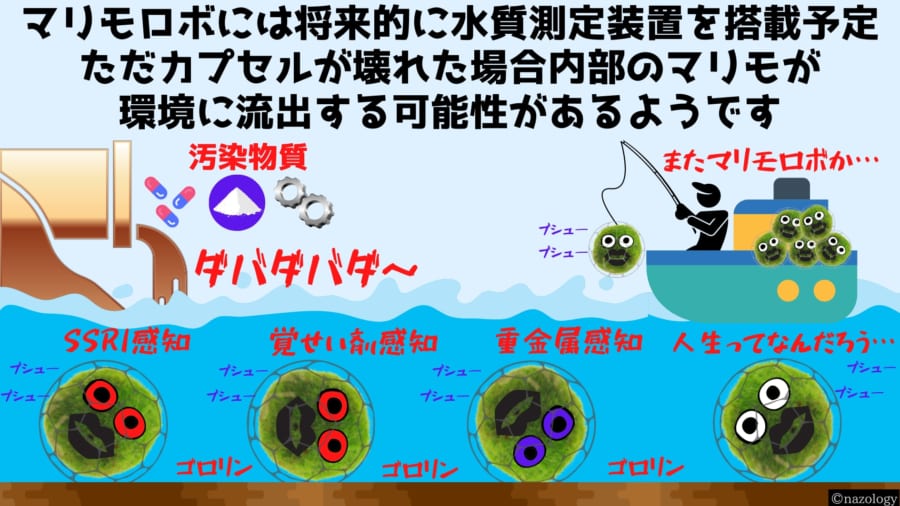
研究者たちは、マリモロボに水質測定装置などさまざまなセンサーを乗せることで、モバイルセンサープラットフォーム(移動式センサー)として利用できると考えているようです。
ただマリモロボには1つだけ弱点がありました。