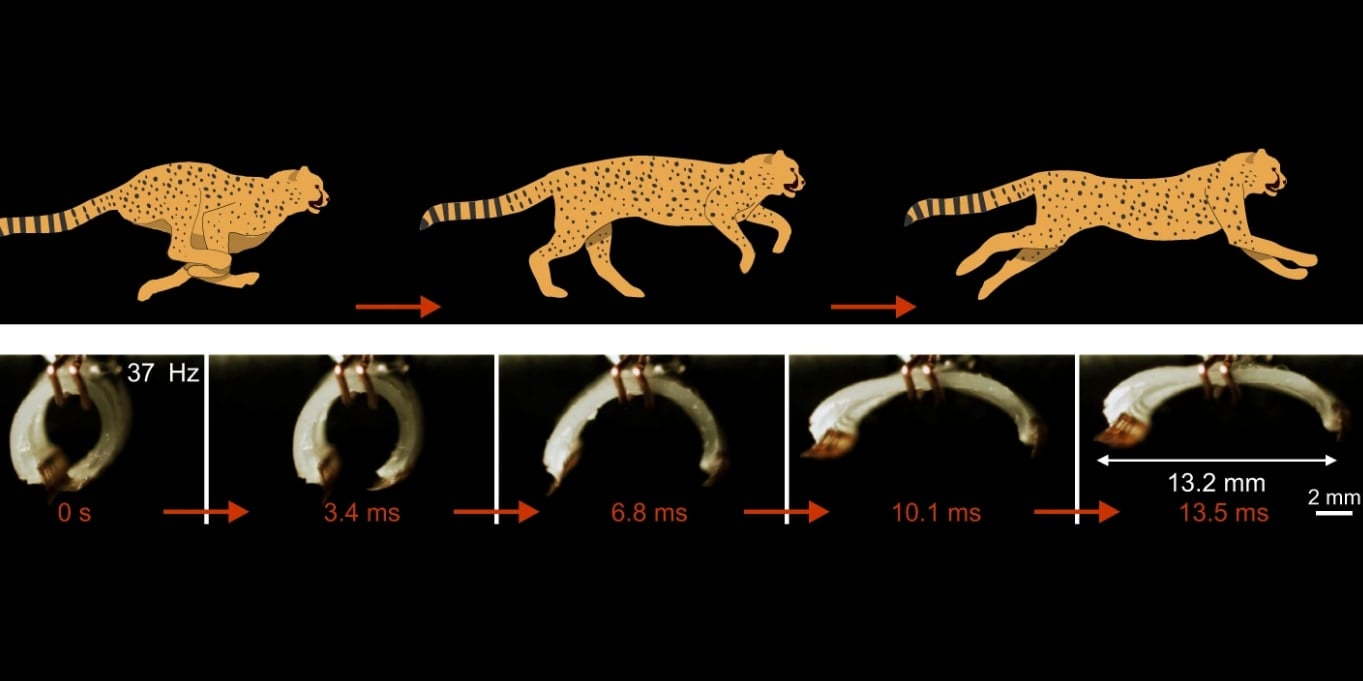


薄い体を曲げて走る小型ソフトロボット
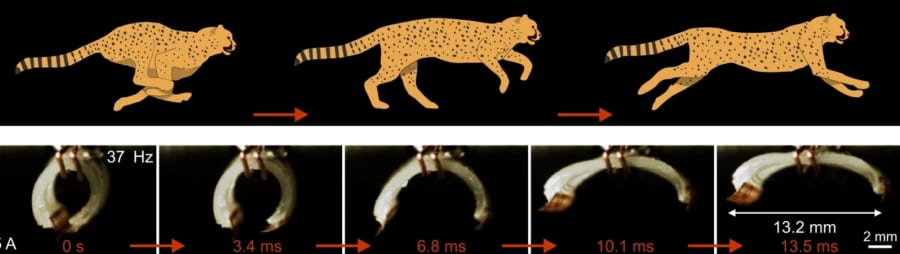
開発された小型ソフトロボットは、柔軟性のある素材が曲がったり伸びたりして前進するよう設計されています。
ちょうどチーターが地面を蹴って体を曲げたり伸ばしたりしながら走るときのようです。
しかし小型ロボットで素早い動作を実現させるためには、できるだけ軽量にし、消費エネルギーも小さくしなければいけません。
小型ロボットに一般的なモーターなどは積めないのです。
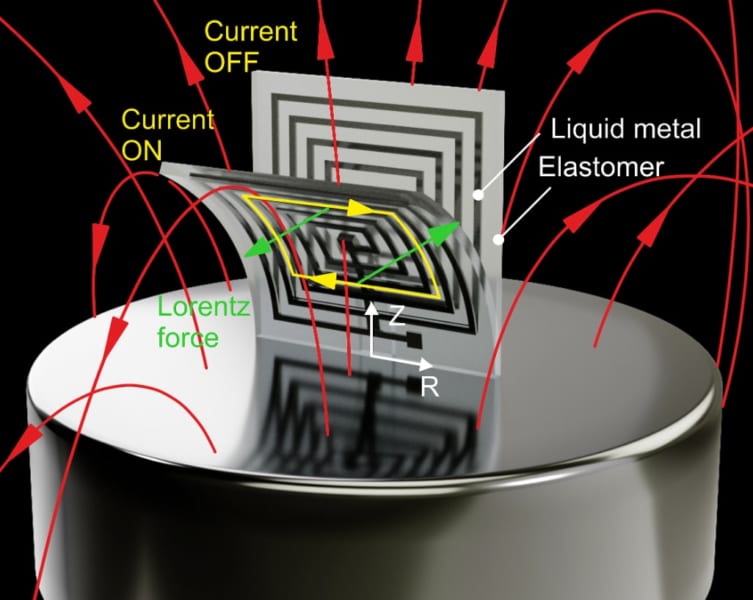
今回研究チームは、磁力を利用してソフトロボットを曲げたり伸ばしたりしています。
3Dプリンタを用いて、1枚の柔らかい素材に液体金属を渦巻き状に印刷します。
そして、この平面上のコイルに電流を流すことで磁界が発生。
磁石の床に置くことで相互に作用させ、電流のON・OFFで素材を任意に曲げたり伸ばしたりできるというわけです。
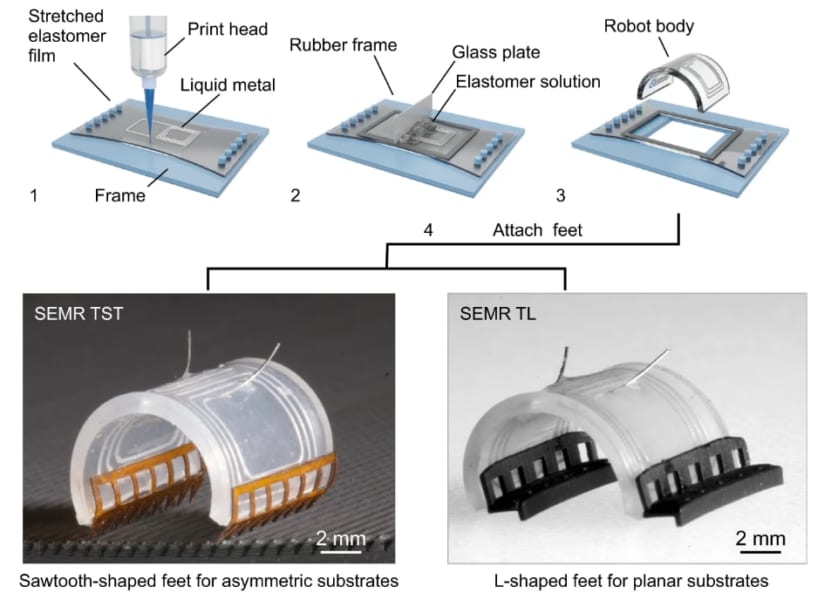
もちろん、素材の伸縮だけでは効率よく前進できません。
そのため素材の両端には足となる「かぎ爪」が付いています。
床の形状によって走る速度は大きく異なりますが、凹凸のある荒い表面では非常に素早く動けるようになりました。
























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)