


チーターよりも素早く走ることに成功
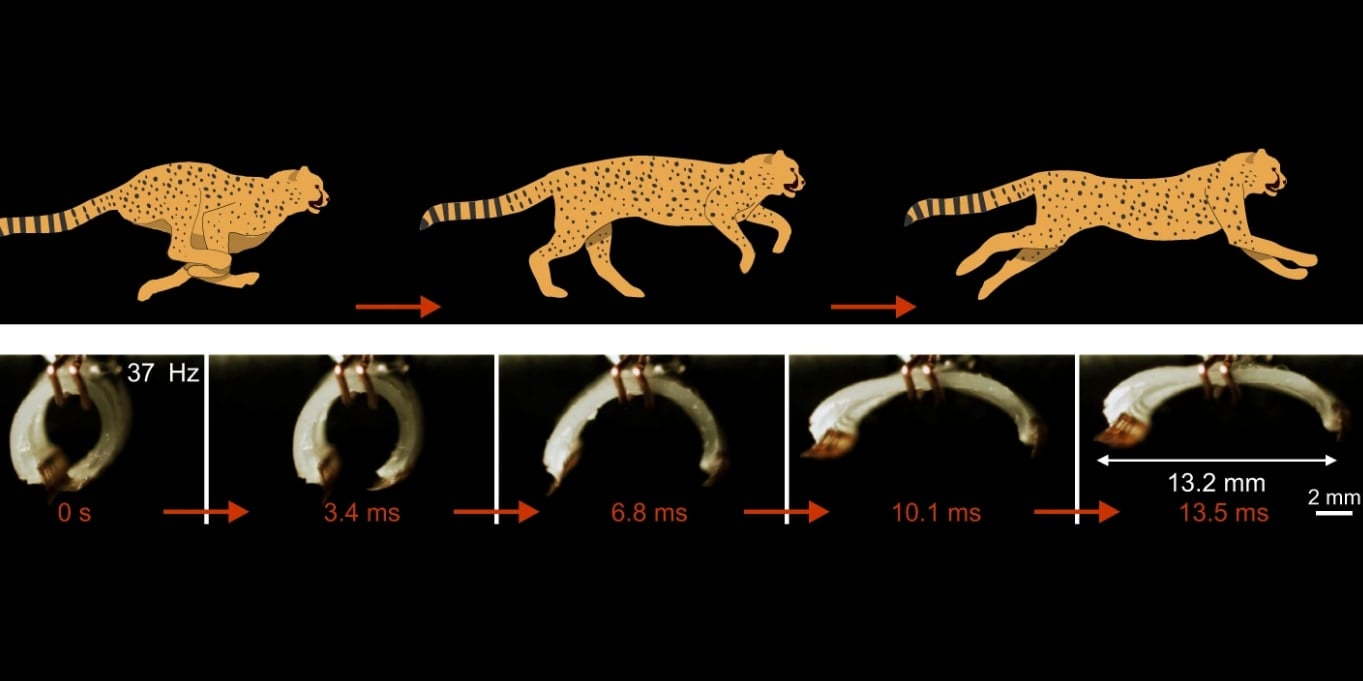
完成したソフトロボットは全長2cm未満の切手サイズです。
そして研究チームは、ロボットの素早さを他と比較するために、1秒当たり体長の何倍の距離を移動できるかを示した単位「BL/s(Body Lengths per second)」を使って測定しました。
その結果、小型ソフトロボットは、任意の平面で35 BL/s、ロボットにとって最適な波形の床では70 BL/sを達成しました。
動物のチーターが20~30 BL/sで走ることを考えると、この小型ソフトロボットはチーターを超える素早さをもっていると言えますね。
ちなみにF1のレーシングカーが約50 BL/sなので、最適な床であれば、レーシングカーをも超えたことになります。
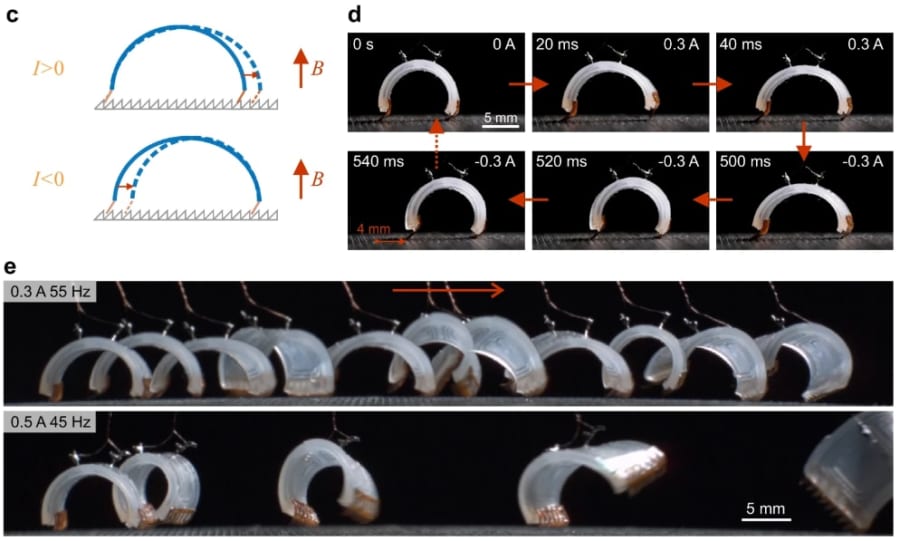
とはいえ、これらの成果は電気を供給するコードによって外部とロボットがつながっている状態で得られたものです。
コード無しのバッテリー型ロボットにすると、その素早さは2.1 BL/sまで落ちてしまいました。
ちなみに、コードをつなげたままであれば、ロボット上部に発泡スチロールを装備して、約4.8BL/sで水中を泳ぐこともできました。
その姿はどこか動物のようであり、「必死で犬かきをしている」ようにも見えますね。
研究チームは今回の開発について、「全体として興味深いプロジェクト」だと評価していますが、バッテリー型ロボットの速度は非常に遅いため、「いくつかの大きな課題が残る」とも述べています。
総合して、素早さを重視した小型ソフトロボットの開発に大きな刺激を与えたと言えるでしょう。


























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)


























