


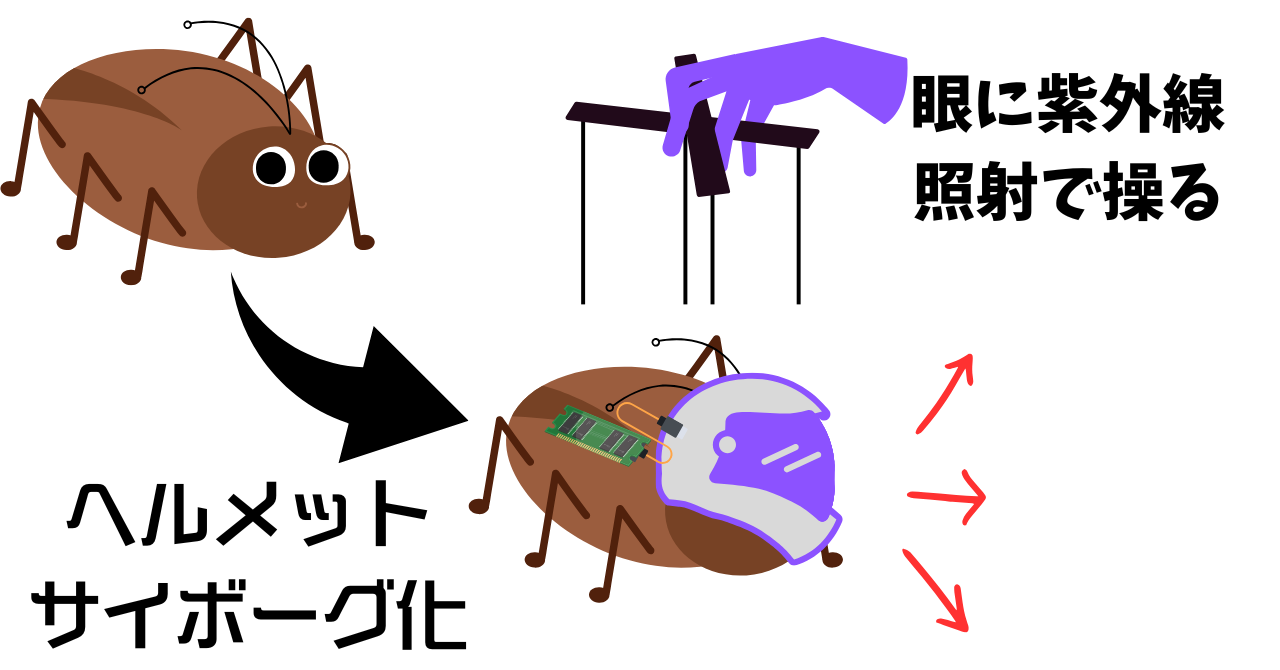
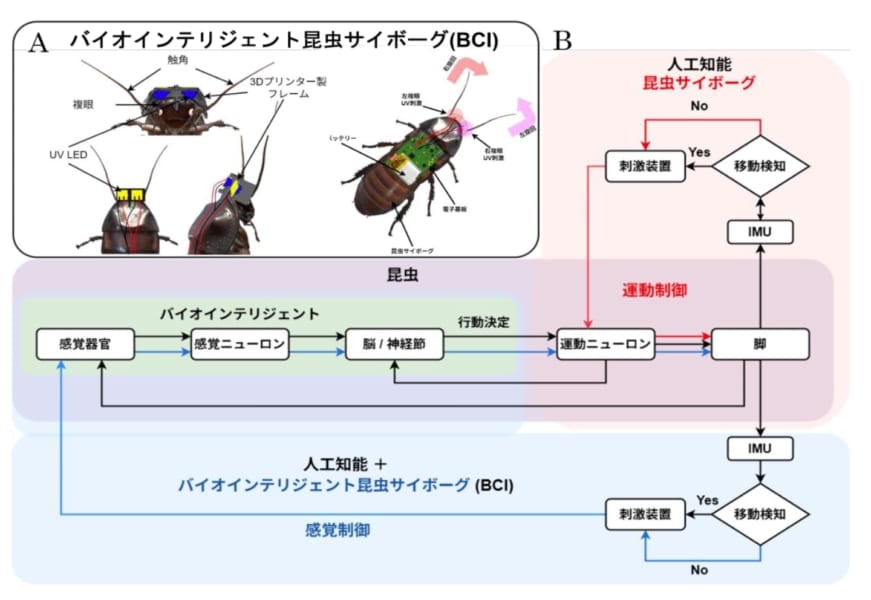
ヘルメットを被ったサイボーグゴキブリの安定的・長時間制御に成功
研究チームはいくつかの実験でこのサイボーグ昆虫の性能を評価しました。
その結果、ヘルメットによって昆虫の感覚器官を損なうことなく、高精度な制御が可能であることが示されました。
構造化されていない複雑な環境下でも、自律的なナビゲーションを行うことに成功しています。
また従来の電気刺激による制御の課題である「刺激への慣れ」も、新しい方法では回避できており、安定的かつ長時間の制御が可能になりました。
今回の研究は、「昆虫の自然な知覚・運動制御機構を活かしつつ、最小限の外部刺激で誘導する」という設計思想の元に実施されました。
従来の電気刺激型では人工的な命令に頼りすぎて昆虫本来の適応能力が損なわれがちでしたが、新しい方法では、センサー情報をもとに「動いていない時だけ紫外線を照射」するフィードバック制御を採用。
これにより昆虫の自然行動を補助する形で制御が実現したのです。
今後、エネルギー効率の改善や行動最適化が進めば、がれきの中の人命捜索や環境調査など、人類が到達困難な場所への応用が期待できます。


























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)

























背中の荷物が重そうな気もしますが昆虫の皆さんは見た目よりずっとパワフルですからそんなでもないんですかね。