


歪んだ空間では推進剤なしに変形を繰り返すだけで移動できると判明!
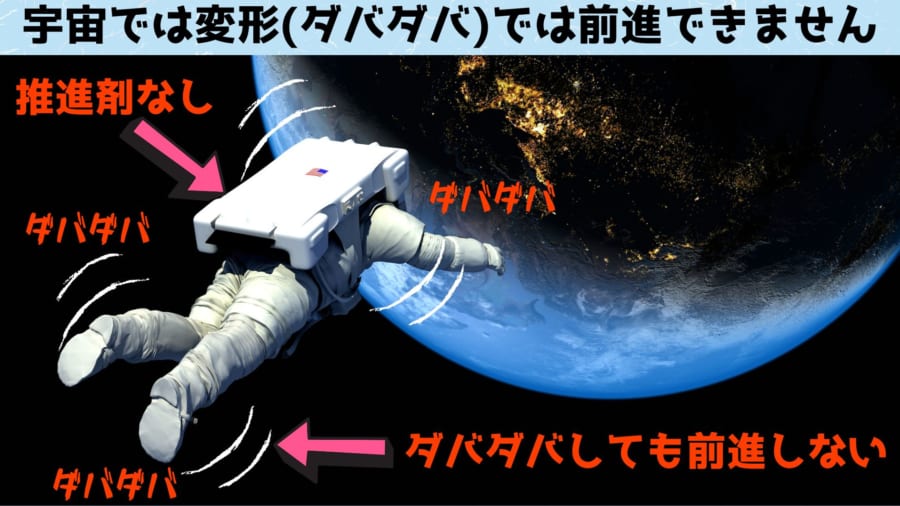
言うまでもありませんが、人間が歩いたり魚が泳いだり鳥が飛んだりして移動できるのは、周囲に地面・空気・水など、押すことができるものが存在するからです。
地面も空気も水もない宇宙空間では、人間も鳥も魚もバタバタともがくだけで、決して前進することはありません。
この事実を少しカッコつけて表記すれば「運動量の交換なしに加速は起こらない」となります。
運動量の交換とはつまり、人間や鳥の筋肉が地面や空気、水を押すことと、その反作用を受けて移動することを意味します。
しかし21世紀になって発表された革新的な論文を期に、物理学者たちは、この常識が歪みのない空間に適応されるものであり、湾曲した空間では理論上、外部との運動量の交換なしに物体の加速が起こり得ることがわかってきました。
理論を正確に理解するには複雑な数式が必要ですが、ザックリ言えば「空間が曲がっているということは、物体の変形が僅かな位置の変化として作用し、物体を自走させる力になりえる」となるでしょう。
しかし、2003年に理論が発表されてから現在に至る20年間、実証は進んでいませんでした。
大きな空間の歪みを生じさせるブラックホールなどが近場にあれば、実証はスムーズにいったでしょうが、残念ながら地球の近辺にはブラックホールは存在しませんでした。
そこで今回、ジョージア工科大学の研究者たちは、20年前に発表された理論を実証するために、歪んだ空間を再現する装置を開発することにしました。
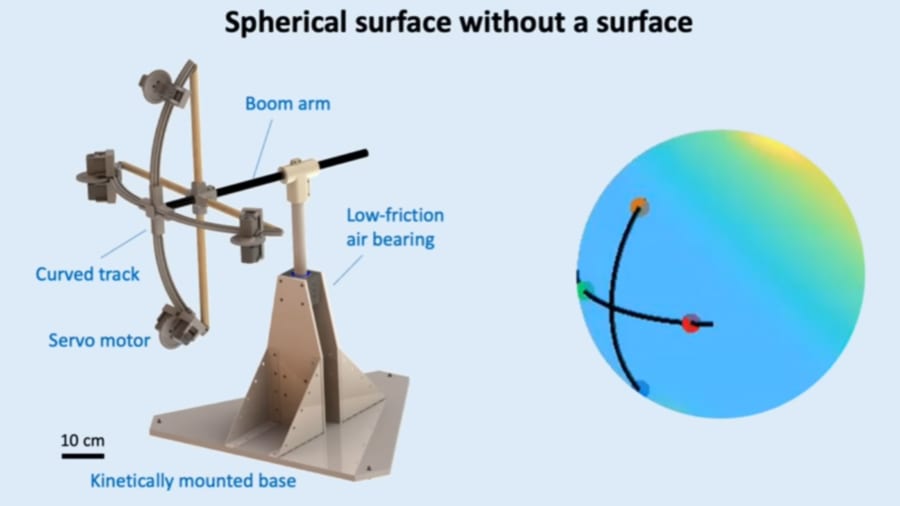
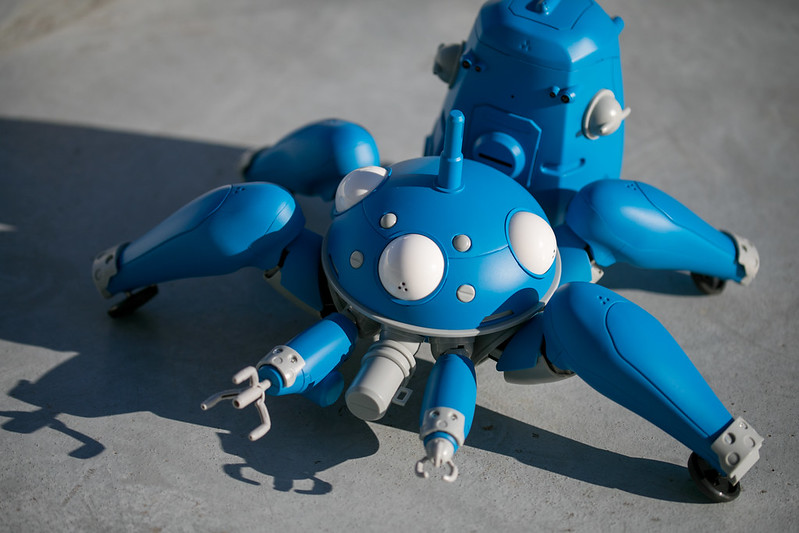
実験にあたってはまず、上の写真のような球体の表面での移動を反映するロボットが開発されました。
このロボットは2本のアームとシャフトによって重力と摩擦の影響が極限まで取り払われており、アームにはロボットの「変形(能動的質量移動)」を担当するモーターが設置されています。
準備が整うと、研究者たちはモーターのスイッチを作動させ、測定を行いました。
すると、理論通りの結果が得られました。
曲面に配置されたロボットがモーターによる質量移動(変形)を起こすと、摩擦・重力・空気抵抗など外部との作用反作用に起因しない力が発生し、ロボットは少しずつ球面に沿って前進していきました。
この結果は、物体の周囲から物体が押せるものを排除した条件下でも、物体の変形によって移動が実現したことを示します。
























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)