豚ゼラチンそのものが動きを感知する
このロボットアームの大きな特徴のひとつは、豚ゼラチンを利用した高度なセンサー機能にあります。
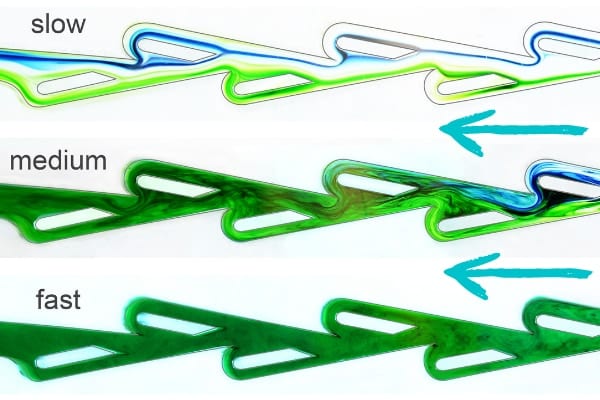
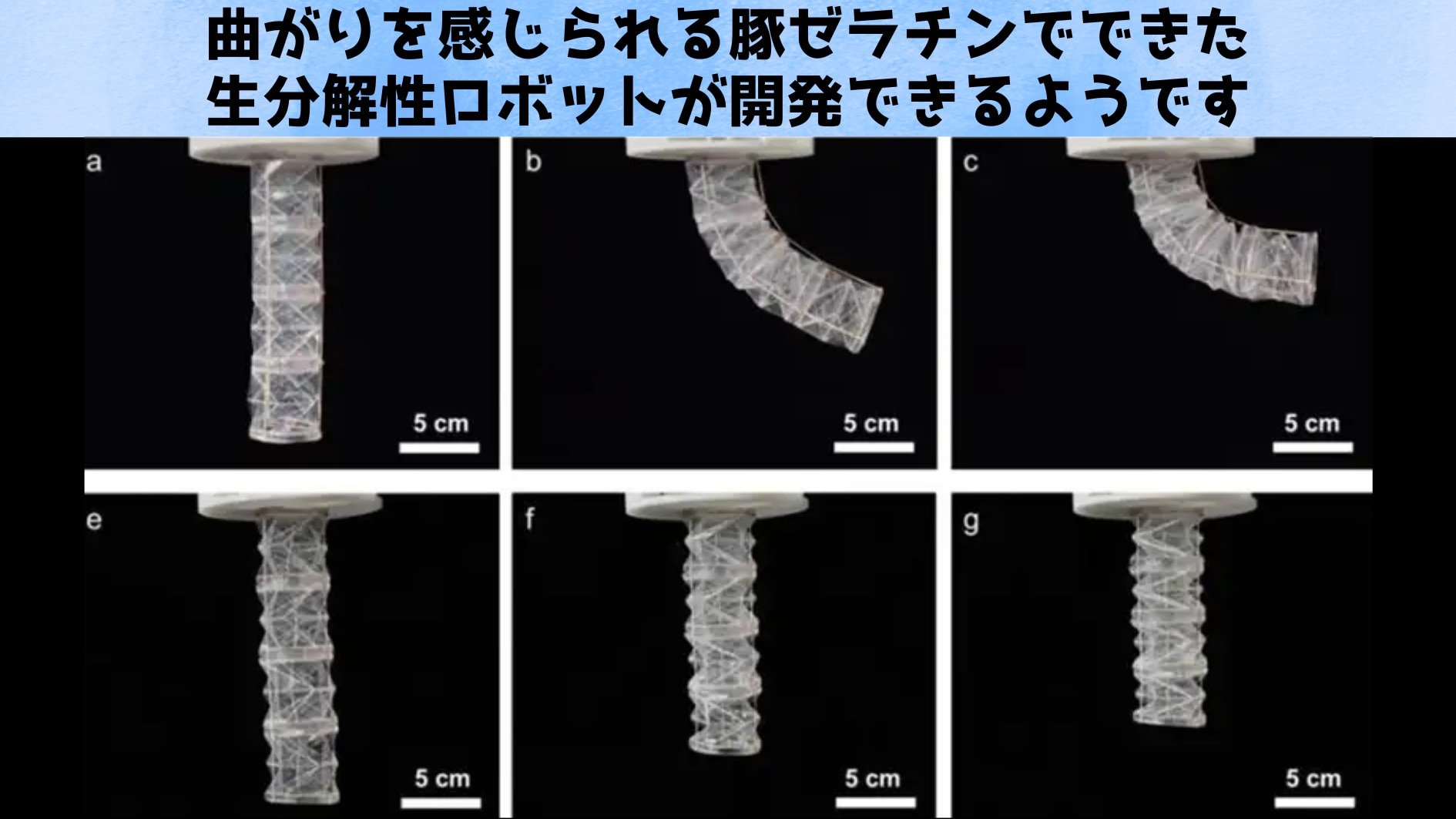
豚ゼラチンは、ロボットが曲がる際にその形状変化に伴って電気抵抗が変わる性質を持っています。
つまり、アームがどの方向に、どの程度曲がっているかをリアルタイムで感知することができるのです。
(※、豚由来のゼラチンに塩(NaCl)などの添加物を加えた「導電性オルガノゲル」が高度なセンサー機能を持つ点にあります。ゲルが曲げられると電気抵抗が変化するため、アームの形状変化をリアルタイムに検知できます。)
具体的には、ゼラチン層が組み込まれたモジュール内で発生する抵抗変化が、センサー信号として記録されます。
この信号は、内部の制御システムに送られ、ロボットアームの正確な位置情報や動作状態としてフィードバックされます。
これにより、外部のモーターや糸を介した駆動システムが、より精密にアームを制御できるようになります。
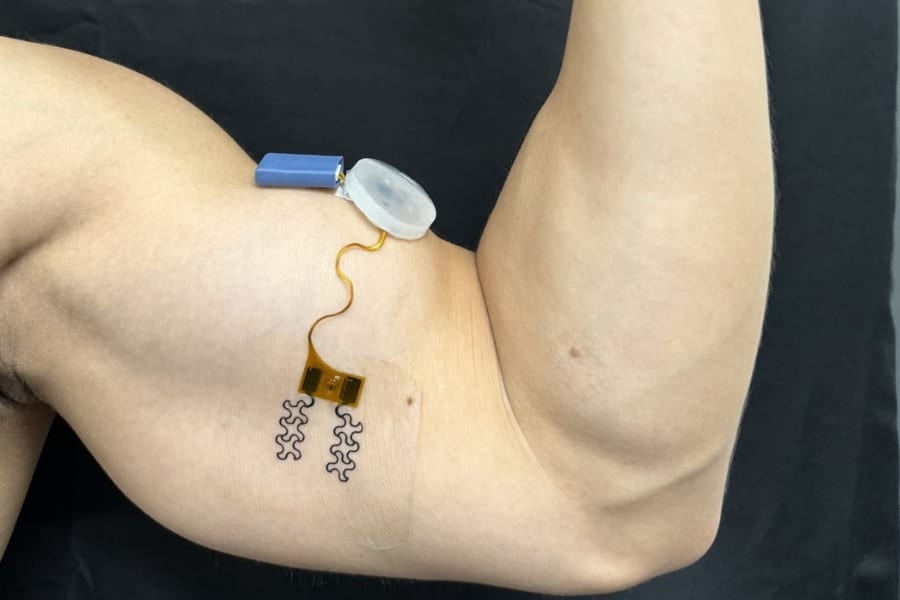
さらに、研究チームは小型のゼラチンセンサーを搭載したモジュールをジョイスティックのような入力装置としても活用しています。
操作する人は、このジョイスティックに手で触れるだけで、センサーが捉える抵抗変化を通じて直感的にロボットの動きを指示することが可能です。
こうして得られたセンサー情報は、制御システムへと即座に反映され、アームの動作をリアルタイムで調整する閉じたフィードバックループが形成されます。
このようなセンサー機能と制御システムの統合により、柔軟でありながらも正確な動作が可能なロボットアームが実現され、医療現場や狭い作業環境など、従来の硬いロボットでは難しかった用途への応用が期待されています。
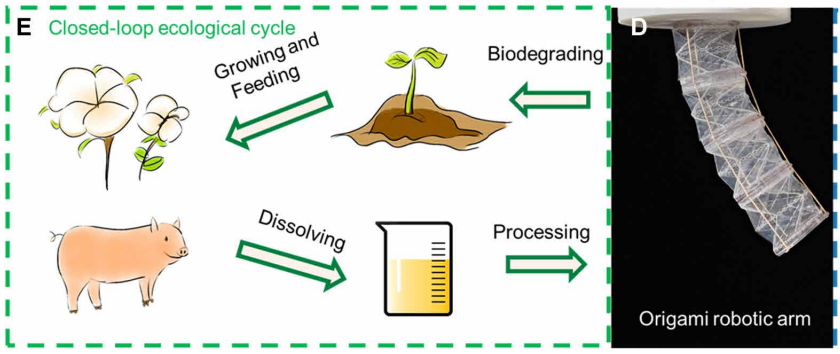
今回の生分解性ロボットは、環境保護と高度な機能性の両立という点で大きな注目を集めています。
西湖大学の研究チームは、「将来的には地球上のロボット数が大幅に増加することが予想され、その結果、大量の廃棄物問題が生じる」と警鐘を鳴らしながらも、本研究がその解決策となりうる点に大きな期待を寄せています。
つまり、使用後に自然に分解する素材を用いることで、従来のロボットが抱える環境負荷を大幅に低減できる可能性が示されました。
さらにソフトロボットは、狭い工業プロセスや医療現場といった、人と安全にやり取りする必要がある分野で大きな進展をもたらす可能性があります。
(※ただ人体内で完全に分解させるためには素材を追加で工夫する必要があるようです)
実際、今回のロボットアームは、柔軟性とセンサー機能を併せ持ち、人体内での医療処置や微細な作業環境での使用にも応用できると期待されています。
生分解性素材の採用が、環境負荷の少ない持続可能なロボット社会の実現に貢献するだけでなく、人々の生活や安全を守る新たなソフトロボティクスの可能性を切り開く重要な一歩となるでしょう。



























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)