


振動で「見える」世界へ!盲目のイヌに「第二の目」を与える触覚ベスト

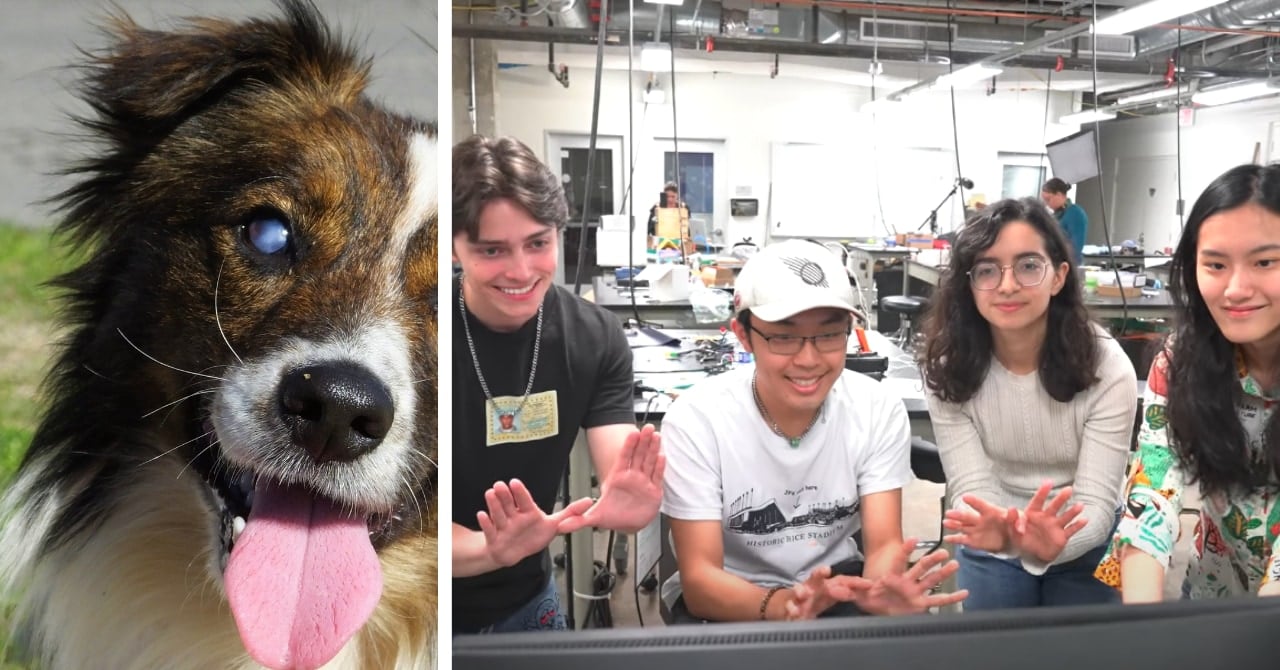
学生たちが開発した「触覚ベスト」は、外見はシンプルながら、内部には非常に洗練されたテクノロジーが詰め込まれています。
ベストとイヌの頭部近くに設置されたカメラ一式ににより、リアルタイムで奥行き情報(深度)をキャプチャーし、障害物までの距離を測定します。
そしてその情報がコンピュータモジュールに送られ処理され、状況に応じてベスト内の小型振動モーターが作動するようになっています。
たとえば、右前方に障害物があると、その部分のベストが“ブルッ”と震え、犬は本能的に「そちらに何かある」と感じ取り、自然と避ける行動をとるのです。
障害物が近ければ近いほどベストのその側の振動が強くなる設計です。
このフィードバックは即時かつ直感的なため、犬にとってストレスが少なく、ほんの数回のトレーニングで応答行動が身につくことが確認されています。

実際、クンデも、すぐに振動信号と障害物との関係性を学び、スムーズに歩行する姿が確認されました。
このプロトタイプは8m先まで「見通す」ことが可能で、クンデに「第二の目」を与えるものとなりました。
重要な機器は防水性であり、ニューストンの暑い気候でも快適に過ごせるよう通気性も重視されています。
バッテリーは約2時間持つため、散歩で活用するには十分です。
今後、チームはクンデとのプロジェクトで得た知識を活用し、他の様々な盲目のイヌに適用したナビゲーションシステムを開発したいと考えています。
このプロジェクトが特別なのは、単なる技術開発ではなく、「目の見えない犬が、再び世界を感じる」その瞬間に、若者の手によるやさしさと情熱が込められている点です。
ライス大学の学生たちは、まだ若くとも、社会に変化をもたらす力を持っています。
そうした若者たちが挑戦がある限り、未来は確実に明るくなるはずです。





























![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)



























> 最近の若者はやる気や意欲がない
この取り組みも別に、わかりやすくて楽で楽しいことをやってるようにしか見えないけどな。
書き出しの部分に食いついて来る人初めて見た
お犬様は嗅覚すごいですからそれを使えないものですかね。
わんちゃんにも即理解できる直感的な情報の伝達方法が良いのでしょうね
イヤホンを使って人間にも応用できないもんですかね
アプリでイヤホンを補聴器代わりにするためにも
結構ハードルがあったように色々と規制があるのかな?