
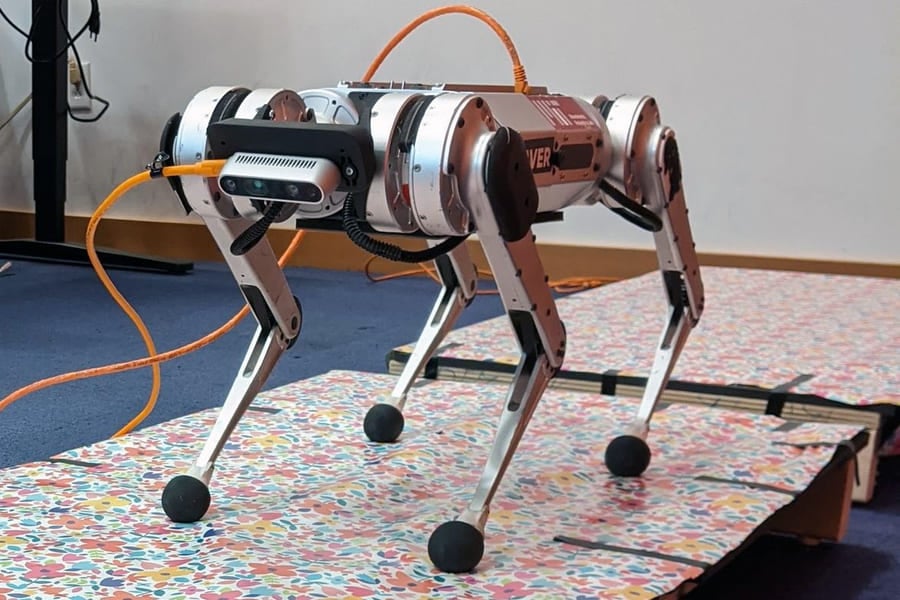
制御が難しくなった4つ足ロボット
野生のチーターは起伏のある複雑な地形の隙間を縫うように、さっそうと駆け抜けることができます。
現在、そんなチーターのような動物の動きを参考にした四足ロボットが飛躍的に進歩を遂げていますが、彼らは本物のチーターのように高低差のある地形を自在に駆け抜けることはできません。
大抵、実験室内で走り回るロボットは、事前に地形をマッピングしたデータを持っていて、それに応じて動きを制御しています。
こうした情報なしに走った場合、ロボットはちょっとした隙間に引っかかって、うまく走ることができなくなってしまいます。
はじめての地形で、うまく隙間を避けるためには、視覚を使う必要があります。
しかし、足の運動の制御に視覚を取り入れるという方法は、現在の俊敏性を増したロボットのシステムにはうまく適合できません。
そこで今回の研究チームは、ロボットの速度と俊敏性を維持したまま地形の隙間を飛び越えるための新しいシステム開発に取り組んだのです。