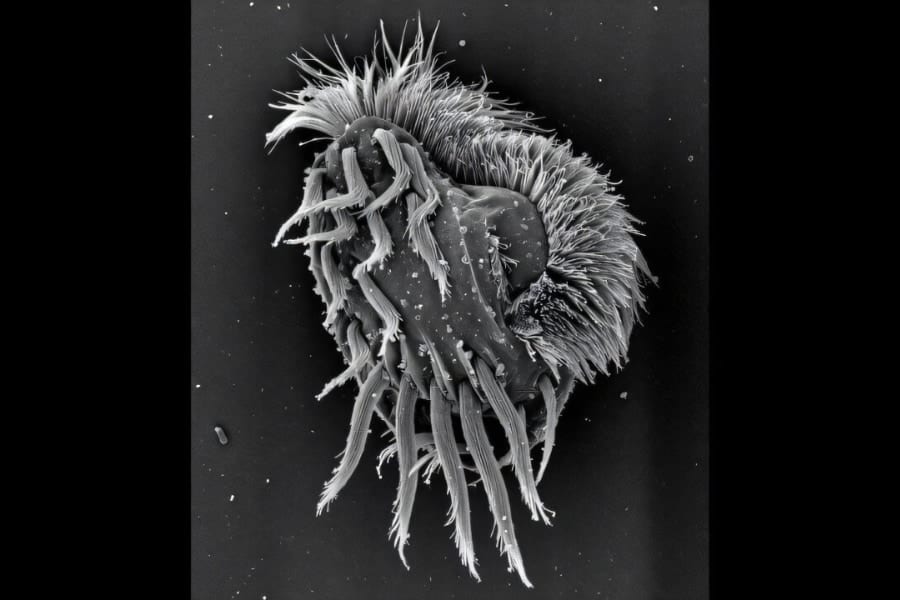
形状記憶合金とレーザーで遠隔操作できる
開発されたカニ型ロボットは、電気や油圧などの一般的な動力源をもっていません。
また複雑な部品やメカニズムで動作することもありません。
歩行の秘密はロボットの材料にあります。

このロボットは、特殊な形状記憶合金で作られています。
熱を加えることで「記憶していた形」に変形し、冷めると元に戻る性質があるのです。
そのため加熱と冷却を繰り返すことで、特定の部位を「曲げたり」「伸ばしたり」と、関節のように動かせます。
そして走査型レーザーを利用することで、ロボットを意図通りに遠隔操作できるようです。
まずレーザーをロボットに照射することで、ロボットは急速に加熱され変形。
しかしロボット自体は非常に小さいため、レーザーが通りすぎると、すぐに冷却されて元の形に戻ります。
つまりロボットの各部位をレーザーで順番に照射していくなら、その順番で関節が動き、意図した動作を作り出せるのです。
例えば、レーザーが右から左に通り過ぎると、ロボットは左から右に移動します。
設計・操作によっては、ただ歩行するだけでなく、回転やジャンプも可能なのです。
さてこの新しいアイデアは、まだ多くの改善や研究を必要としますが、より便利なマイクロボットを生み出す可能性を秘めています。
今回は研究チームの気まぐれでカニ型に作られましたが、尺取虫型、コオロギ型、カブトムシ型など、さまざまな形状に仕上げることができます。
将来、レーザーで遠隔操作できるいろんなタイプのマイクロボットが登場するかもしれませんね。



























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)