体内の空気圧を操って、脚を自在に開閉する!
脚の開閉の仕組みについて、もう少し詳しく見ますと、クモの頭胸部には小さな空間があり、そこから8本の脚に向かって細い管が通っています。
この空間を収縮し、管にすばやく血液を送り込むことで、それぞれの脚が加圧され、ピンと外側に伸びるのです。
(「吹き戻し」という、先端に丸まった紙のついた笛のおもちゃをイメージするとわかりやすいかもしれません)
ということは、クモが死んだ後、この空間に外部から管を挿入して、空気を送り込めば、脚を開かせることができます。
チームが目指したのは、まさにこのシステムでした。
今回使ったのは、コモリグモ(Wolf spider)という徘徊性の小さなクモです。
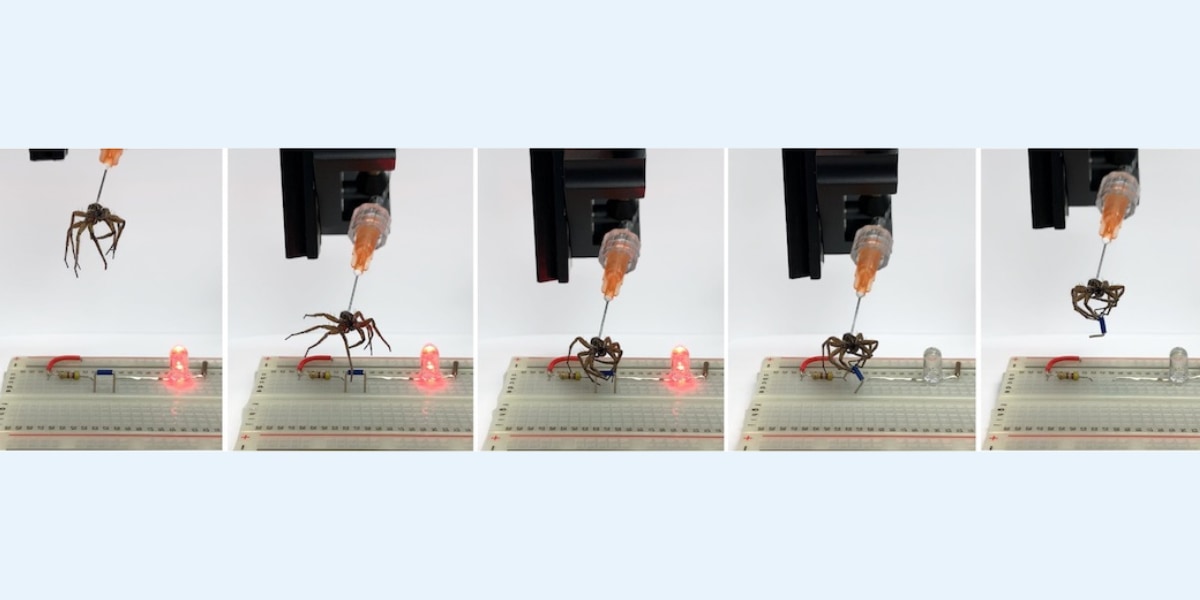
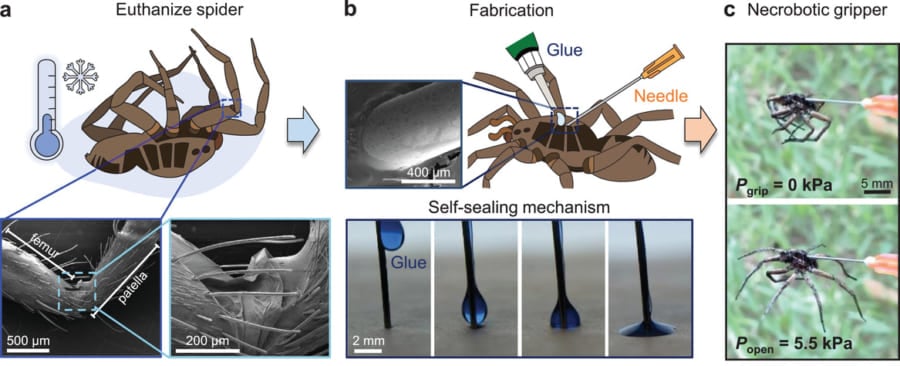
チームはまず、安楽死させたコモリグモの頭胸部に注射針を差し込み、先端を瞬間接着剤で固定。
針の後端は、微量の空気を送り込むことのできる専用の装置に接続します。
これだけでネクロボットの完成です。
実際に、注射針から空気を送り込むことで、死んだクモの脚をまるで生きているかのように開かせることに成功しました。
また、空気圧を調節することで、自在な脚の開閉も実現しています。
実験では、1匹の死んだクモの脚を計1000回開閉させて、どの程度持ちこたえられるかをテストしました。
その結果、1000サイクルに近づくにつれて、脚に摩耗や損傷が起き始めています。
しかし、これは死後の脱水が原因であるため、脱水を防ぐコーティングを施すことで解決可能です。
さらにチームは、この死んだコモリグモ(重さ33.5mg)のグリップシステムを用いて、3種類の物を持ち上げる試験を行いました(下図を参照)。
1つ目は、電気ボードに接続された「ジャンパー線(21.6mg)」で、これを抜くと、LEDライトがオフになります。
2つ目は、より大きな「クモの死体(45.2mg)」で、3つ目は、赤色に染色した「発泡ポリウレタンのブロック(31.0mg)」です。
結果、死んだクモの脚は、すべての物体を持ち上げることに成功し、最大で自重の130%以上の重さを持ち上げられることがわかりました。

研究チームは、このグリップシステムについて、回路基板を操作したり、小さな部品を持ち上げたり、あるいは、自然環境に溶け込ませて、昆虫を捕獲するのに応用できると考えています。
さらに、クモ自体が生分解性であることも重要な点です。
故障や消耗によって機能しなくなっても、土に戻せば自然に分解されるので、環境にやさしく、プラスチックのように処理困難な廃棄物を出すこともありません。
プレストン氏らは、”ネクロボティクス”という分野が奇怪で悪夢のように聞こえることを承知しています。
「一見、クモが生き返ったように見えますが、無生物であることは確かです。
私たちの研究では、かつて生きていたクモに由来する”自然材料”としての意味で厳密に使用しています。
クモは、ロボット工学において本当に役立つものを提供してくれるのです」
今後、ネクロボティクスの分野がどこまで進歩するかはわかりませんが、まかり間違っても、人体に応用されることはあってはならないでしょう。




























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)