



なぜクモの脚は死んだ後に丸まるのか?
本プロジェクトは、研究主任のダニエル・プレストン(Daniel Preston)氏が、2019年に同大の機械工学科に研究室を設立した直後にスタートしました。
氏は、金属や電子機器、硬質プラスチックといった従来の材料には目もくれず、ハイドロゲルやエラストマー(ゴムのような弾性を持つ材料)などを空気圧や化学反応で作動させる、ソフトロボティクスを専門としています。
その中で、プレストン氏が新たに注目しているのが、”死んだ生物の体を動かすロボット工学”です。
彼は、この未開拓の分野を「ネクロボティクス(Necrobotics)」と呼んでいます。
共同研究者のフェイ・ヤップ(Faye Yap)氏は、ネクロボティクスの第一弾として、クモを使うことになったキッカケについて、こう話しています。
「研究室で作業をしている際、廊下の端にあるクモの死骸に気づきました。
そのとき私たちは、なぜクモの脚が死んだ後に丸まるように縮むのか、とても興味を抱いたのです。
その答えはすぐにわかりました。
クモには、人間の上腕二頭筋や三頭筋のような、二の腕を自由に曲げ伸ばしできる筋肉がありません。
クモにあるのは屈筋(くっきん)という(曲げる専門の)筋肉だけで、これにより、脚を内側に曲げられますが、伸ばすことはできません。
その代わり、クモは体内の”水圧”をコントロールすることで、脚を外側に開くことができます。
しかしクモが死ぬと、水圧を制御する機能が失われ、脚は自然と丸まってしまうのです」

プレストン氏とヤップ氏は、このメカニズムに感心し、ロボット工学に応用することを思いついたといいます。
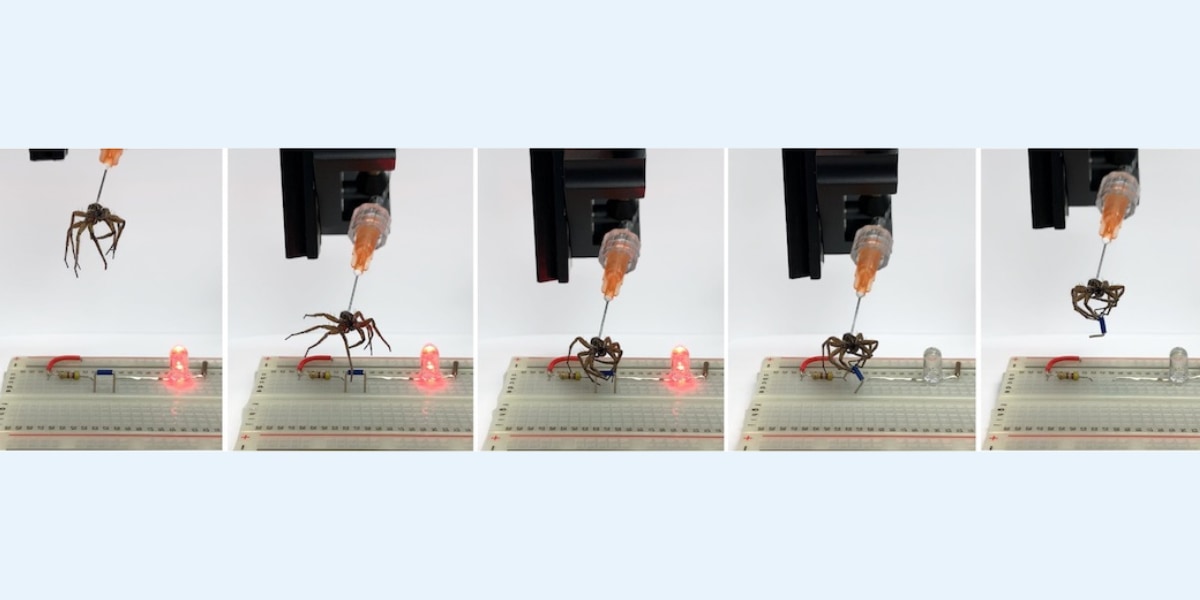
では、実際に両氏が開発した”ネクロボット(Necrobot)”を見ていきましょう。
























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)