



従来のロボットハンドは「優しくつかむ」のが苦手

触手の奇妙な形状や絡めとるような動きから、触手自体に生理的な嫌悪感を抱く人は多いようです。
そのためSFでは、昔から触手が人々を襲う恐怖の対象として扱われてきました。
現在では触手に対する偏ったイメージが1つの創作ジャンルとして確立されているほどです。

ところが自然界の触手を模倣することは、私たちの生活をもっと便利にしてくれるかもしれません。
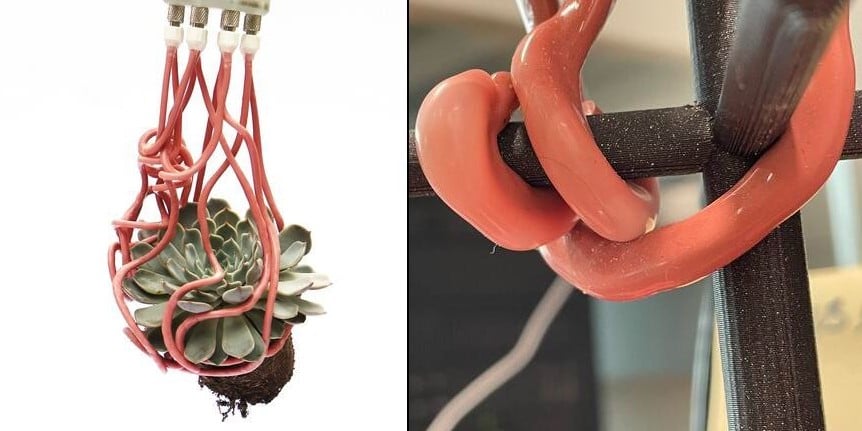
ベッカー氏は、触手が「ものをつかむ」のに役立つと考えました。
現在のロボットハンドのほとんどは、繊細で不規則な形状の物体をつかむことが苦手です。
脆い物体を壊さずにつかんで持ち上げるためには、強すぎないグリップ力と工夫されたつかみ方が必要だからです。

クレーンゲームをしたことのある人なら、弱い力で物体を持ち上げることの難しさがよく理解できるでしょう。
これをゲームではなく実生活や仕事で利用するためには、確実性を高めなければいけません。
ロボットハンドに高度な機械学習アルゴリズムとたくさんのセンサーを搭載して、ロボットハンドや物体に加わる圧力を検知・フィードバックしていく必要があるのです。
しかしベッカー氏は、触手のようなロボットハンドを開発することで、従来の複雑さを排除できると考えました。


















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)



![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)




![Smalife スクリーンアンプ 16インチ [2026アップグレード版] スマホ拡大鏡スタンド 5倍大画面満喫 スクリーン拡大器 目の保護 疲労軽減 スマホ画面拡大 スタンド折り畳み式 軽量 携帯便利 全部スマートフォンに適用(ブラックC)](https://m.media-amazon.com/images/I/41Ql2fO48jL._SL500_.jpg)