シンプルな構造の「触手ロボ」が物体を絡めとって持ち上げる

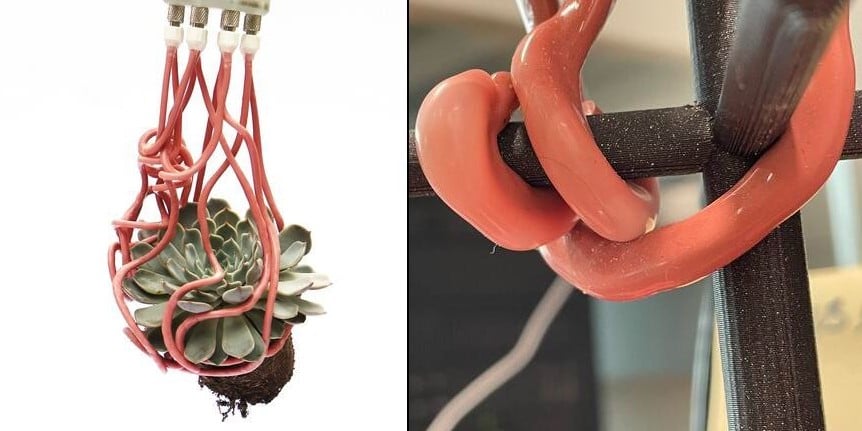
開発された触手ロボには、12本の柔らかい触手があります。
この構造は自然界の触手からヒントを得たものであり、触手ロボは、まるでクラゲが獲物を捕らえるかのように、優しく物体を包み込んで持ち上げることができます。
この触手はゴム製であり、中が空洞になっています。

それぞれの触手は、片側が薄く、もう片方が太くできているので、加圧することで雨の日のくせ毛のようにカールするようになっています。
触手1本の力は非常に弱く、2.3本の触手だけでは物体に絡んでも持ち上げることができません。
しかし、より多くの触手が、互いに絡まり合ったり物体に絡んだりすることで保持力が向上。持ち上げることも可能になります。
集合的な保持力は強いですが、触手1本1本が加える力が弱いので、非常に壊れやすく繊細な物体でも損傷させたりへこませたりすることはありません。
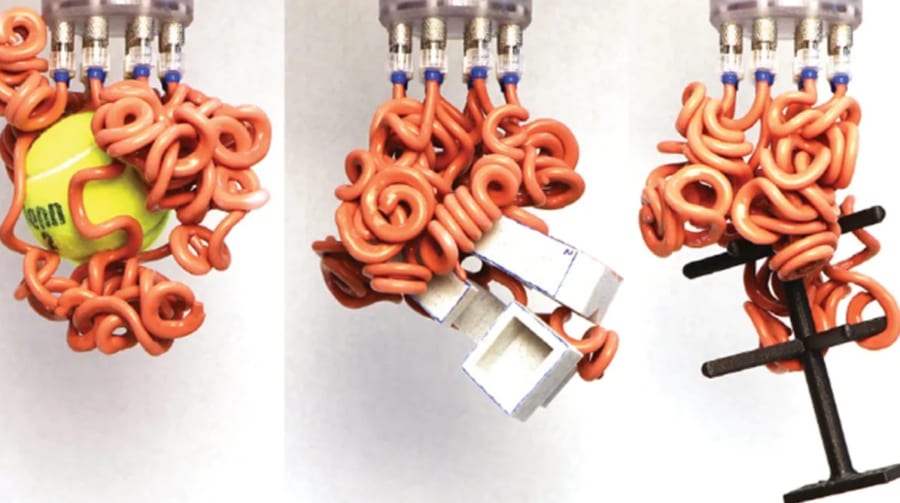
実際にテストでは、複雑な形状のオブジェクトや繊細な植物を傷つけずに持ち上げることに成功しました。
また触手ロボのメリットは、従来のロボットハンドのような複雑さがないことだと言えます。
センサーや機械学習アルゴリズムなどを搭載しなくても、加圧・減圧だけで、物体を優しく掴んで移動させられるのです。
将来的には、果物や野菜の流通、医療現場、ガラス製品を扱う倉庫での活躍が期待できます。
空想世界の触手は恐怖・嫌悪の対象となっていますが、現実世界の触手は便利で有用な存在だったのです。





















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)



![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)




![Smalife スクリーンアンプ 16インチ [2026アップグレード版] スマホ拡大鏡スタンド 5倍大画面満喫 スクリーン拡大器 目の保護 疲労軽減 スマホ画面拡大 スタンド折り畳み式 軽量 携帯便利 全部スマートフォンに適用(ブラックC)](https://m.media-amazon.com/images/I/41Ql2fO48jL._SL500_.jpg)