







人型ロボット「アトラス」が物を「つかみ」「運び」「放り投げる」

今年で10歳になる人型ロボット「アトラス」は、身長1.5m、体重89kgであり、28個の油圧式関節を備えています
ここ数年は特に、ダイナミックな動作とスピードの面で目覚ましい進歩を遂げています。
ボストン・ダイナミクスの人形ロボット「アトラス」については、パルクールをするロボットとして様々な画像がSNSを中心にシェアされて話題を呼んでいるため、誰でも一度は目にしたことがあるかもしれません。
そして今回、ボストン・ダイナミクス社はさらに魅力的なアトラスの動画を公開してくれました。
それは建設現場を想定した環境で、人間をサポートする建設作業員のアトラスの姿です。
動画の中でアトラスは、周囲から板を発見し、それを渡し板にして移動ルートを自ら確保します。
そして工具袋を拾い上げ、櫓の上にいる作業員の元まで運んでいます。
さらに木箱を突き落とし、アトラスが足場から降りるための踏み台も用意していました。
最後はパルクールのように軽やかなエアリアルツイストを決めて動画を締めくくっています。
人間に劣らない働きを見せただけでなく、宙返りなど技術難度の高い動作も実践して見せたのです。
今回の印象的な動画が作成された背景には、研究チームのある目的が関係しています。
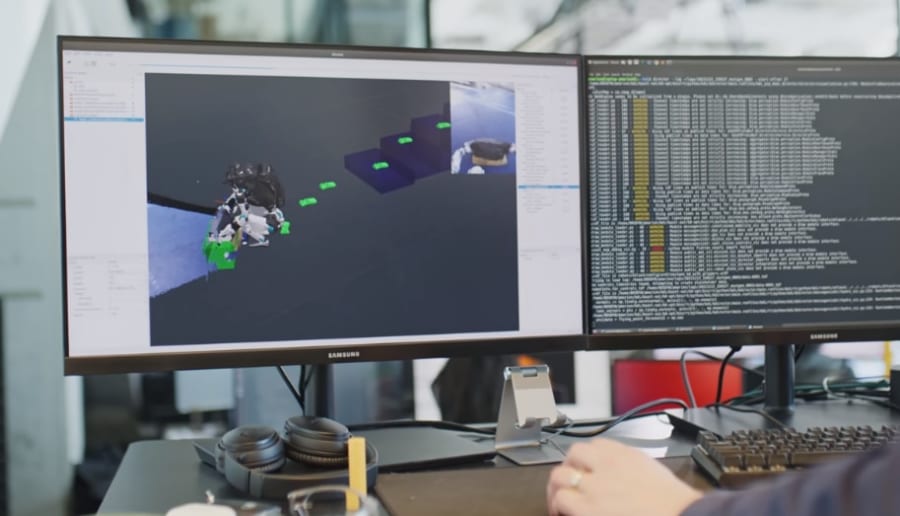
アトラスチームを率いるスコット・クインダースマ氏が述べるように、「ダンスやパルクールのように、アトラスをただダイナミックに動かすだけでなく、実用化に向けて、アトラスが環境と物体を認識して操作できるよう開発している」のです。

人間が無意識に行っている「物体を認識して操作する」技術も、プログラムで動く人型ロボットにとっては簡単ではありません。
例えば、「工具袋を拾い上げる」という1つのタスクにおいて、アトラスは、環境内に無数に散らばる物体の情報をカメラで取得・処理し、該当する工具袋を発見する必要があります。
そして工具袋に駆け寄りながら、持ち上げるべき形状のモデルを構築し、「工具袋のどこをつかむべきか?」「どの角度から手を近づけるか?」「持ち上げる前に体勢や体の各機能をどう準備する必要があるか?」などの疑問に答えなければいけません。
また「走るとき」「ジャンプするとき」には、工具袋のどこを持てば良いのかも決定する必要があるでしょう。
アトラスと研究チームは、これら複雑な処理を実際に行い、動画によって証明しました。
これはアトラスが大きな飛躍を遂げたことを意味します。
もちろん、ボストン・ダイナミクス社が認めるように、アトラスの実用化はまだ先の話です。
それでも、次回の動画で実用化に向けたさらなる飛躍が見られることを期待したいものです。
























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)


























アシュラ-ガロボ、ドルア-ガロボとはドルア-ガの塔にちなむギルやカイのゲ-ムプログラムで発見したモンスタ-名でございます。それは腕が胸部や背中に収納されたロボットア-ムでそれが収納されていますとカバ-がありますと普通の人型の矢や胸部があるものに見えますが、緊急の時は開きましてアシュラ-型、ドルア-ガロボ型に六つの腕に収納されていたあと四本のアームが出まして土方ロボとして一生懸命役立つ独立したAIアームロボ四本ではありますまいかと云う事でございます。アドバイス、アイデア、フッカツデア、工作奉仕。例えばリニアなどの地下トンネルで働く時の緊急アームとしてでございます。では失礼致しました。