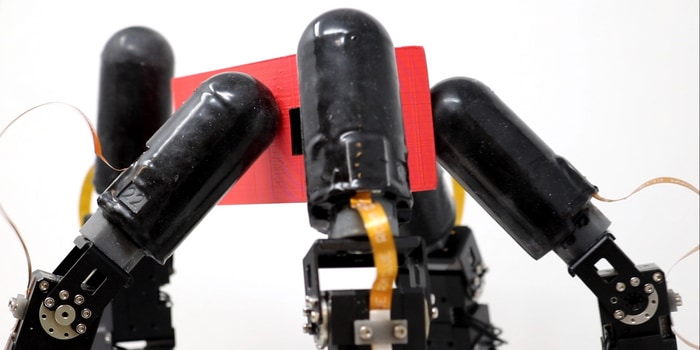
触覚だけで物体を器用に扱える光学式ロボットアーム
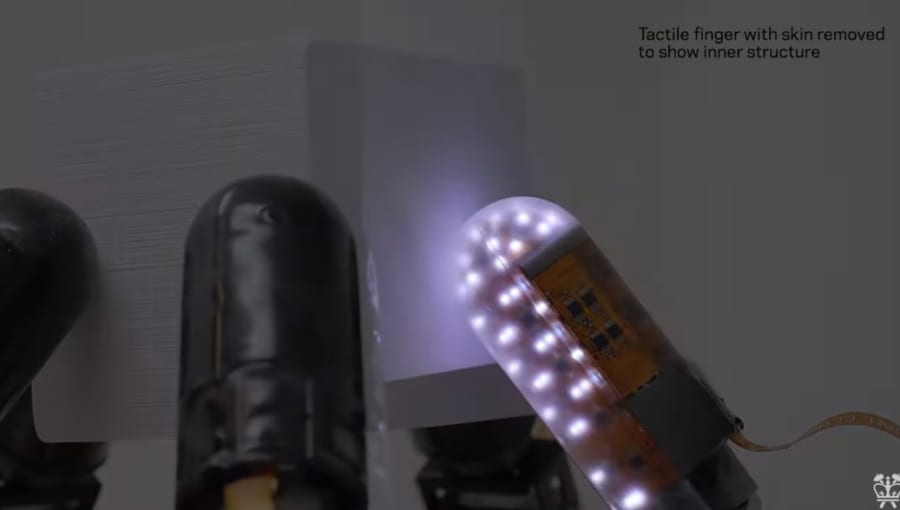
新しい光学式のロボット指には、LEDライトとフォトダイオード(光検出器として働く半導体のダイオード)が内蔵されています。
内部ではLEDの光をロボット皮膚の内側に当てており、その反射パターンが記録されています。
そして指が物体に当たって皮膚が変形した場合、同じくLEDの反射パターンも変化。
反射パターンは常に記録されているため、「物体が指のどこに触れているか」「どれほど強く触れているか」などの情報が得られるようになっています。

そして運動学習アルゴリズムを様々な触覚パターンで訓練することで、触覚だけでも器用に物体を扱えるロボットアームが完成しました。
ちなみに最新の物理シミュレーションと高度な並列プロセッサを用いたおかげで、現実であれば約1年間かかるトレーニングをたった数時間で終えることができました。
完成したロボットアームは、まるで人間のように繊細な動きと力で物体を保持できます。

従来のロボットアームでも「物体をがっしりとつかんで持ち上げる」「手のひらに置いて静止させる」くらいは行えます。
しかし片方の腕だけでは、物体を空中で動かしたり回転させたりはできません。
一方、新しいロボットアームは、1本の腕、つまり5本の指先だけで物体を保持し、各指を少しずつ動かしながら物体の向きを変えたりアームの中で転がすように回転させたりできます。
まるで人間が無造作にスマホやリモコンをつかんで、そのまま片手で正しいポジションに調整している時のようです。
テストでは、新しいロボットアームが、球体やL字ブロックなどつかみにくい物体を素早くアーム内で動かすことに成功しています。
また外部カメラなどの視覚フィードバックに依存していないので、暗闇でも同様の器用さを保てます。
人間も暗闇で物体をつかんだり操作したりするのが得意であり、この点でもロボットアームは人間に近い性能を手に入れたことになりますね。

さらに人間がそうであるように、触覚だけでも器用なこのロボットアームは、外部カメラで得た視覚情報を追加することで、より高度で繊細な物体の扱いが可能になると考えられます。
ここまで器用なのであれば、2本のロボットアームがサンドイッチを作るのもそう遠くはないでしょう。
ロボットの脳は現在急速に進化していますが、それに負けじと、ロボットの手や指も急速に進化しているのです。


























![[コロニル] ウォーターストップカラーズ 75ml メンズ ブラウン Free](https://m.media-amazon.com/images/I/41Jh7ZSFd-L._SL500_.jpg)



![ALLINLUCKY TFカード マイクロSDカード SD TF 512GB メモリーカード 高速データ転送 ミニSDカード SD変換アダプタ メモリケース付き 高安定性 [並行輸入品]](https://m.media-amazon.com/images/I/41HrWHxO7JL._SL500_.jpg)