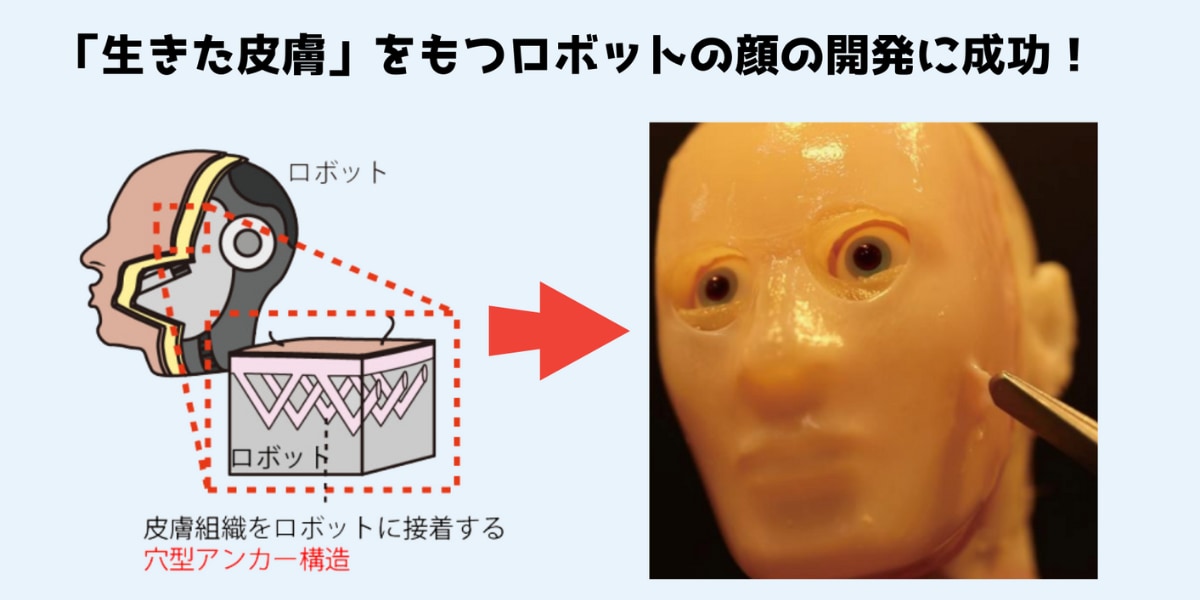
「生きた皮膚」でロボットの顔を覆うことに成功!
私たちヒトの皮膚がその下の筋肉層との間で滑らないことからわかるように、皮膚は皮下組織とスムーズに面で接着されています。
その鍵を握るのが「皮膚支帯(ひふしたい)」です。
皮膚支帯は主にコラーゲンからなる繊維組織で、皮膚の下に広がって、皮膚を所定の位置に固定する役割を果たします。
さらに皮膚支帯は筋肉の動きを皮膚に伝達する役割も担っており、特に顔においては表情筋によるスムーズな表情の形成に欠かせないのです(下図の左を参照)。
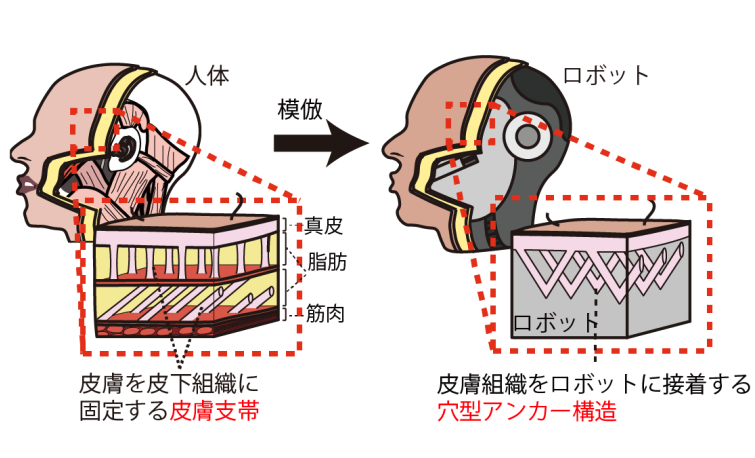
そこでチームは、この皮膚支帯の仕組みに着想を得て、ロボットの素肌に培養皮膚を接着する新手法を編み出しました。
その名も「穴型アンカリング手法」です。
この方法ではまず、ロボットの顔表面にV字型の穴をたくさん開けておきます(上図の右を参照)。
そしてそのV字穴に培養皮膚を流し込み、内部でゲル化させることで、ロボットの素肌に培養皮膚をしっかりと”つなぎ留める(アンカリング)”するのです。
この手法を用いることで、培養皮膚が安定して接着した顔型ロボットを作製することに成功しました。
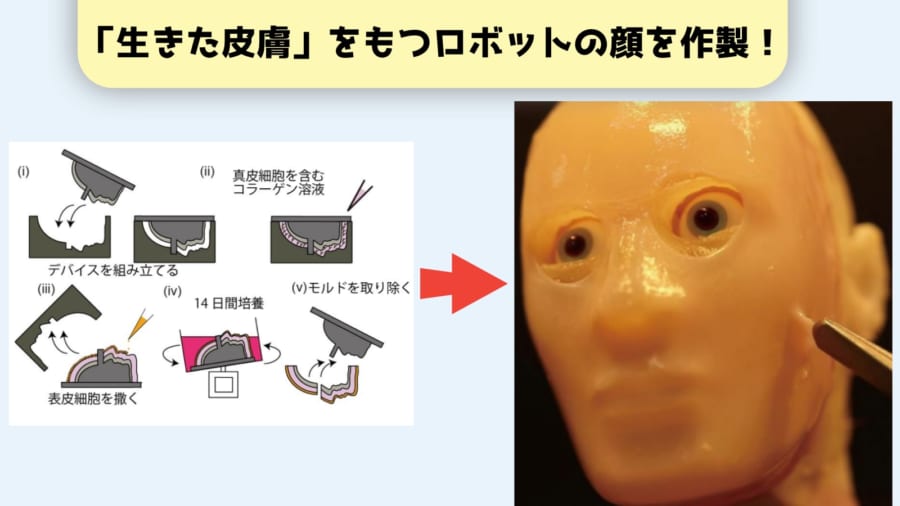
さらに、ロボットの動力がちゃんと培養皮膚へと伝達されるかをテスト。
その結果、ロボットのモーターの動力が穴型アンカーを介して培養皮膚に伝達されることで「笑顔」を作り出すことにも成功したのです。
実際の様子がこちら。

現在はまだ研究の初期段階であるため、ご覧のとおり、ロボットの顔はかなり不気味なままです。
しかし今後さらなる改良を進めることで、より自然な見た目かつ本物のヒトと同じ生体機能を持ったロボットが誕生するでしょう。
また研究者らは今回の知見について、ロボットへの応用の他に、化粧品開発や薬剤の効能テスト、移植素材としての活用など、あらゆる分野での活躍が期待できると話しています。
今のところは「違う、そうじゃない」と感じる人も多いかもしれませんが、皮膚を持つロボットを生み出す技術は着実に進展しているようです。
本物のヒトとロボットの顔の見分けがつかなくなる日は近いかもしれません。




























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)