ゼノボットの設計
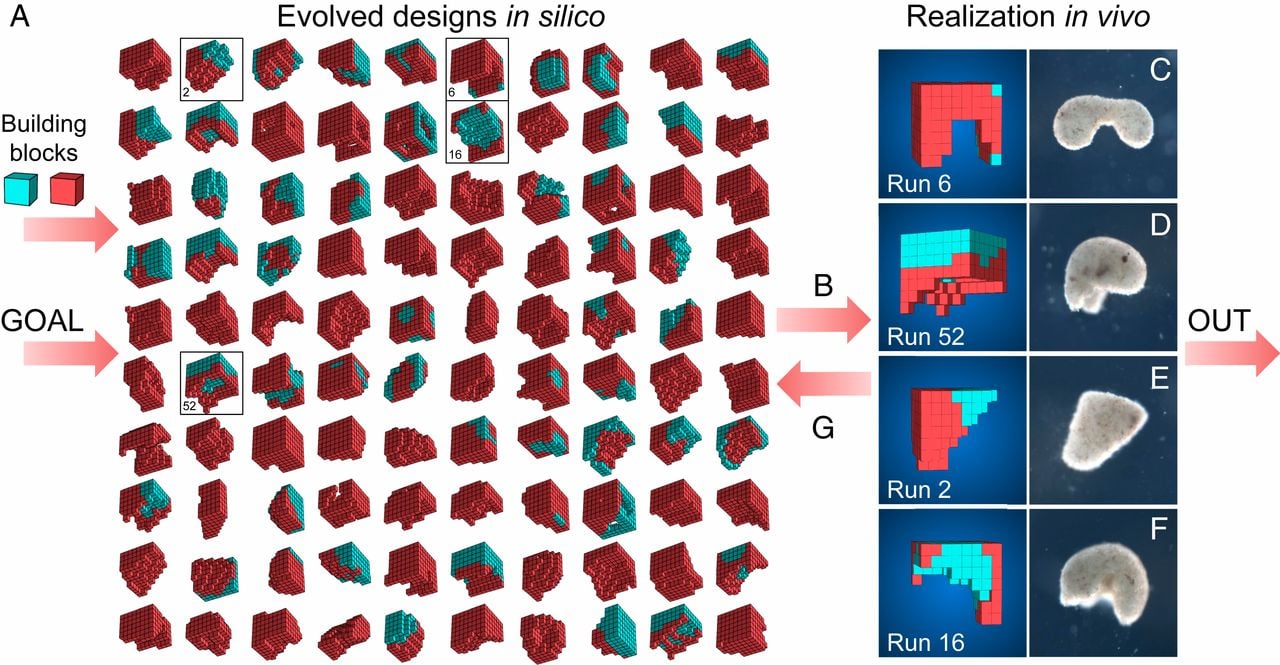
ゼノボットを作るにあたり、研究者たちはまず、単純な直線移動が可能な、基本モデルを「進化的アルゴリズム」を用いて設計しました。
進化的アルゴリズムによる設計とは一種のシミュレーションです。
仮想空間においてランダムな細胞の配置がなされた塊を作り出し、その中で偶然運動能力を持った細胞塊をベースに(他は消去される)次世代を形成させます。
その次世代のなかから、さらに優秀な運動能力を持つものを選別します。
この過程を繰り返すことで、擬似的な適者生存のルールをプログラムに当てはめる方法です。
また研究者たちは初期設定に仕様される細胞の塊を均一な細胞ではなく、皮膚と筋肉を混ぜた形に設定しました。
外郭を作る皮膚と駆動体である筋肉は、生体ロボットを作るには最低限、必要な細胞だと判断されたからです。
コンピューター内部の仮想空間で100世代が過ぎた頃には、4本脚の動物から頭と尻尾と前脚を取り除いたような、胸と後ろ足だけを持つ2本脚の奇妙なデザインの細胞塊が、最適解として選抜されました。






















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)