チーターの高速走行のカギは床反力だった
チーターの走行を分析するうえで、研究チームはチーターがもつ独特な「飛翔期」に注目しました。
飛翔期とは、走行中にすべての足が地面から離れた状態を指します。
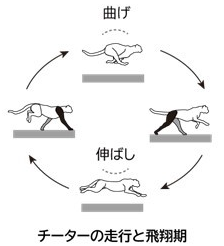
例えば、ウマなどの動物は、一連の走行動作のなかでも体を曲げたときが飛翔期となります。
ところがチーターの場合は体を曲げたときだけでなく、体を伸ばしたときも飛翔期となり、合計2種類の飛翔期をもっているのです。
そこで研究チームは、チーターの飛翔期を構成する重要な2つの要素「曲げ伸ばし運動」と「上下運動」だけを抜き出したシンプルな力学モデルを構築。
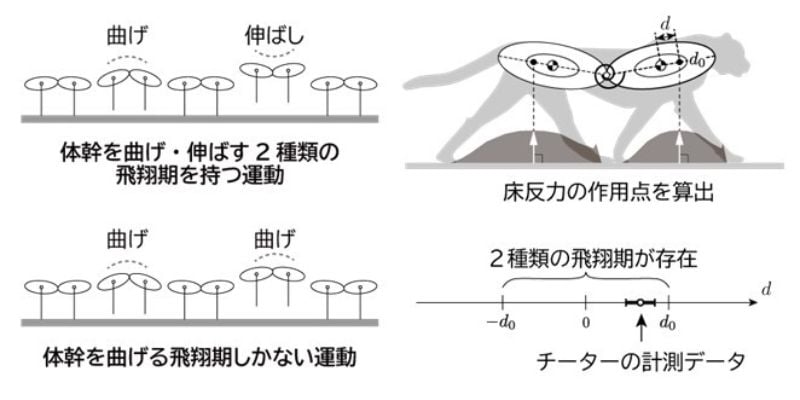
そして、このモデルを解析することで、2種類の飛翔期を生み出す条件が、床反力(脚が床から受ける力)によって決定されると分かりました。
また2種類の飛翔期をもつことで、運動の周期が短くなると判明。
つまり、2種類の飛翔期を生み出す足り方や体の仕組みこそが、チーターの高速走行を可能にしていたのです。
今回の結果は、動物の運動メカニズムを明らかにするだけでなく、運動能力の優れたロボット開発にも役立つでしょう。
床反力に注目してロボット脚の動かし方をプログラムしたり設計したりするなら、ロボットにも2種類の飛翔期をもたせ、高速走行させられるかもしれませんね。




















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)


![TFカード マイクロSDカード SD TF 512GB メモリーカード 高速データ転送 ミニSDカード SD変換アダプタ メモリケース付き 高安定性 [並行輸入品]](https://m.media-amazon.com/images/I/41HrWHxO7JL._SL500_.jpg)