見知らぬ土地では過去の「ナビゲーション記憶」を活用!
約100年にわたる研究により、ミツバチは卓越したナビゲーターであることが明らかになっています。
彼らは嗅覚や日光、垂直に立つ建物や自然物の目印、地球の磁場などを使って、進むべき方向を決定します。
またミツバチは賢い学習者でもあり、過去に体験した別々の記憶同士の関連性を見つけ、そこに共通するルール(法則)を認識することも可能です。
そこで研究チームは、ミツバチが見知らぬ土地に放り出された場合、どのように飛行をナビゲートするか調査しました。
チームは2010年と2011年の夏の終わりに、ドイツ北東部ブランデンブルク州の農村で実験を開始。
実験では、ミツバチに飛行に支障のない重さ(10.5mg)のトランスポンダ(電気信号の受信・送信ができる装置)を装着させ、彼らがどのように飛行するかを追跡しました。

実験用のミツバチは、下画像にあるような、農村の異なる場所に設置されている5つの巣箱(ホーム A・B・C・D・E)から計50匹集めました。
そして、彼らをホームから遠く離れた見知らぬ土地である「実験用のテストエリア(画像のF)」に放ちました。
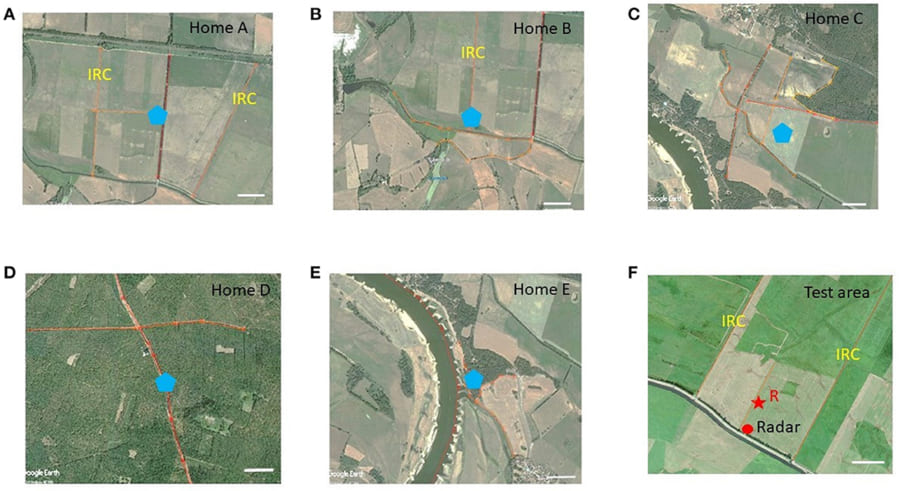
テストエリアにはレーダーが設置されており、半径900メートルの範囲内でトランスポンダの信号を検出できます。
またテストエリアには、最も目立つ目印として南西から北東に向けて平行に伸びる用水路(IRC)があります。
ホームAとBの地域は、テストエリアFと景観が最もよく似ており、Cは類似性が中程度、DとEはまったく景観が似ていません。
この条件下で、ホームA〜Eに所属するミツバチたちがテストエリアFでどんな飛び方をするかを実験しました。
(ちなみに、ホームA〜EおよびテストエリアFには地上のライン以外に、垂直の建物や自然物など、ミツバチの目印となるような構造物はありません)
チームは事前の予想として、テストエリアに放たれたミツバチたちは、新しい景観に慣れるために、リリース地点を中心とした探索飛行を行うと考えました。これは見知らぬ土地に行ったミツバチが取る一般的な行動です。
実験ではレーダーを使って、各ミツバチの探索飛行パターンを20分~3時間にわたって記録しました。
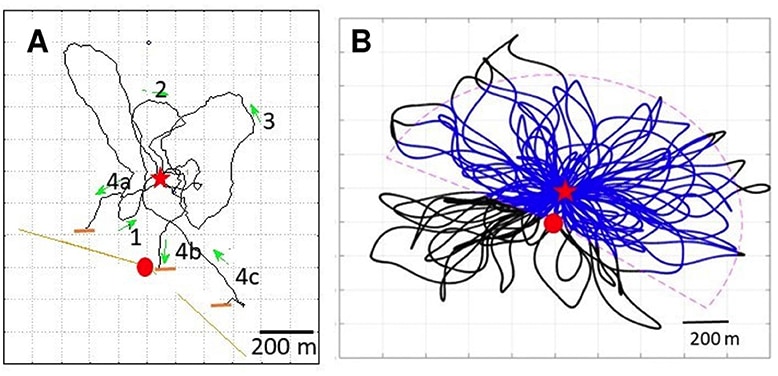
チームはデータの収集後、異なるアルゴリズムを用いて、リリース地点を中心としたテストエリアでの「ランダム飛行モデル(ミツバチがランダムに飛行した場合の飛び方)」を2パターン生成し、実際の飛行データと比較。
すると、どの飛行データもランダム飛行モデルとは異なっていたことから、ミツバチたちは単にランダムな探索飛行をしているわけではないことが伺えました。
要するに、何の目的もなくフラフラ飛んでいるのではなく、何らかのルールに基づいて飛んでいるようなのです。
そこで次に高度な統計手法を用いて、テストエリア内の100×100メートルの区画ごとに、飛行の方向や頻度を分析。
その結果、多くのミツバチが地上を走る用水路の上を長い時間にわたって繰り返し飛んでいたことが分かりました。
これは彼らが、地上の目立つ直線ラインを目印に飛行をナビゲートしていることを示唆します。
そして最も重要な発見は、巣箱AとBに属するミツバチたちが、テストエリアの用水路や道路の上を最も長い時間かけて飛行し、ランダム飛行モデルと大きくかけ離れた飛行パターンを示したことです。
先に述べたように、AとBの景観はテストエリアと類似性が高く、用水路や道路などの直線ラインも豊富にあります。
つまりAとBのハチたちは、ホーム環境で学習したナビゲーション記憶をテストエリアでの探索飛行に役立てていたと考えられるのです。
反対に、テストエリアと類似性の低いDとEのミツバチたちは、他のグループと比べて、用水路を目印とする飛行が少なく、アルゴリズムが示したランダム飛行モデルに最も近い飛行パターンを示していました。
これはホームがDとEのミツバチたちが、用水路を見たことがなく地上の直線ラインに慣れていなかったためと予想されます。
以上の結果から、ミツバチは飛行機登場初期の人間のパイロットたちと同じように、地上の直線ラインを目印に飛行をナビゲートしていることがわかります。
研究主任のランドルフ・メンゼル(Randolf Menzel)氏は「見知らぬ土地を探索する際、ミツバチはホーム環境と新しい環境における地上の類似点および相違点を活用しているのでしょう」と述べています。
小さな昆虫のミツバチは、人間のパイロットと同じような高い知性を備えているようです。
























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)