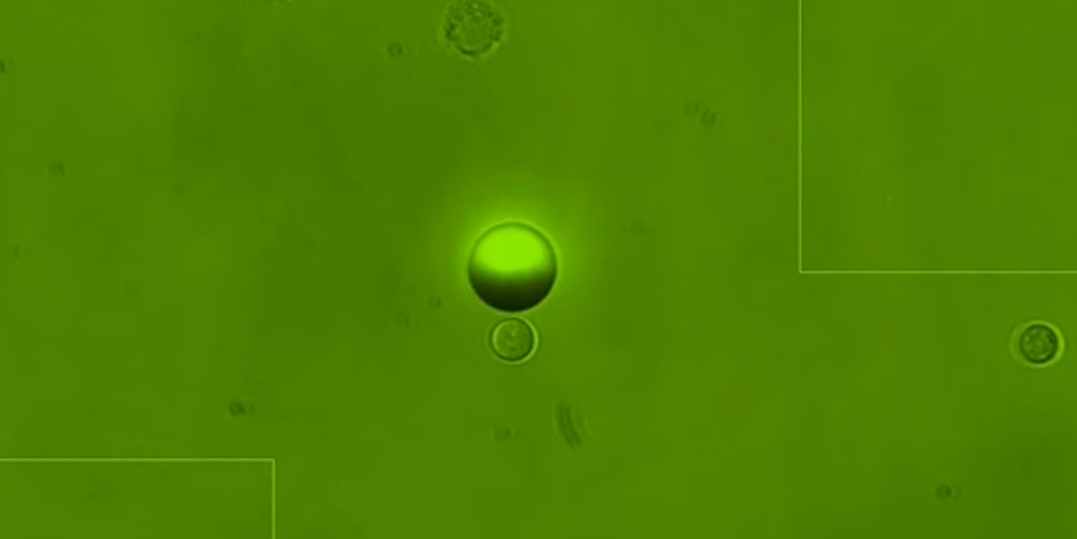
細胞サイズのマイクロボットが細胞1個を掴んで運ぶ
研究チームは、自ら遊泳する「細菌」や「精子」などから着想を得て、マイクロボットを自律的に、もしくはオペレーターの制御で体内を移動できるようにしました。
非常に小さなロボットを駆動させる一般的な仕組みには、「磁気駆動メカニズム」と「電気駆動メカニズム」があります。
磁気駆動メカニズムとは、マイクロボットに磁性粒子を取り付け、外部からの磁場により遠隔操作するというもの。
これは正確なコントロールが可能であることや、電気が通らない場所でも操作できるというメリットがあります。
一方、電気駆動メカニズムとは、マイクロボットに電極を取り付け、外部からの電気信号によって操作する方法です。
このメカニズムは、電気信号を用いて選択的な捕獲・輸送・放出が得意であり、細胞の局所的な電気変形を引き起こしたりできます。
今回開発されたマイクロボットには、磁気駆動メカニズムと電気駆動メカニズムの両方が組み合わされた「ハイブリッド推進・ナビゲーションシステム」が採用されました。
また、このマイクロボットには、細胞の表面に存在する化学的特性を識別するためのセンサーが取り付けられています。
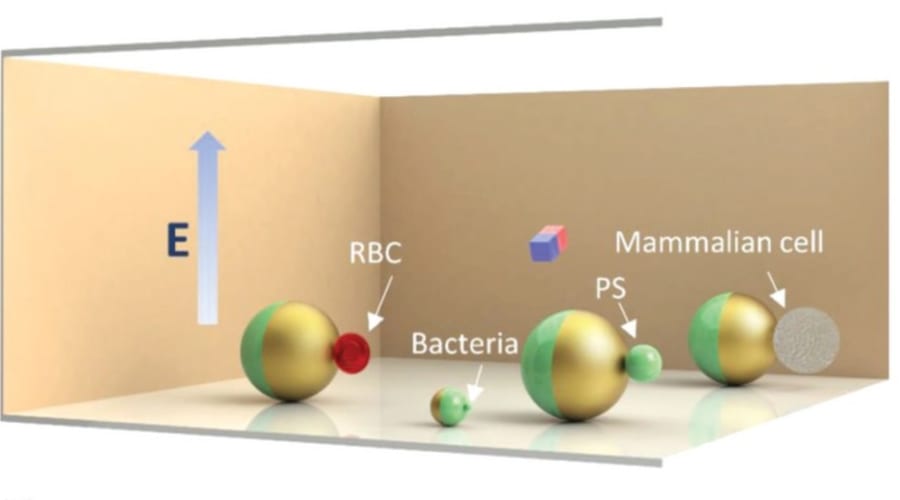
その結果、マイクロボットは血液サンプル内を自由に行き来し、細胞を識別して捕獲できるようになりました。
例えばマイクロボットは、赤血球やがん細胞、細菌を見分けて捕獲できます。
また、「健康な細胞と薬物で傷ついた細胞」、「問題によって死にかけている細胞とプログラムされた自然な死(アポトーシス)が進行している細胞」を区別できました。
これらの細胞を捕獲するかしないかの決定もオペレーターの操作次第です。
そして捕獲した細胞を、分析するために外部の機器に移動させることもできます。
もちろん現時点ではまだ難しい話ですが、研究チームの意気込みとしては生体内での実験をすぐにでも行いたいと気持ちのようです。
もし、マイクロボットの体内への注入や排出(または生体分解)などの技術が確立できれば、単一細胞レベルでの診断、薬剤導入、遺伝子編集も可能になるかもしれません。
私たちの目に見えない「細胞レベルのミクロな治療」こそが、最先端を走る医療の1つとなるのです。



























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)