アンスロボットの行動特性、修復機能について
この研究では、アンスロボットの形や動きについて調べています。
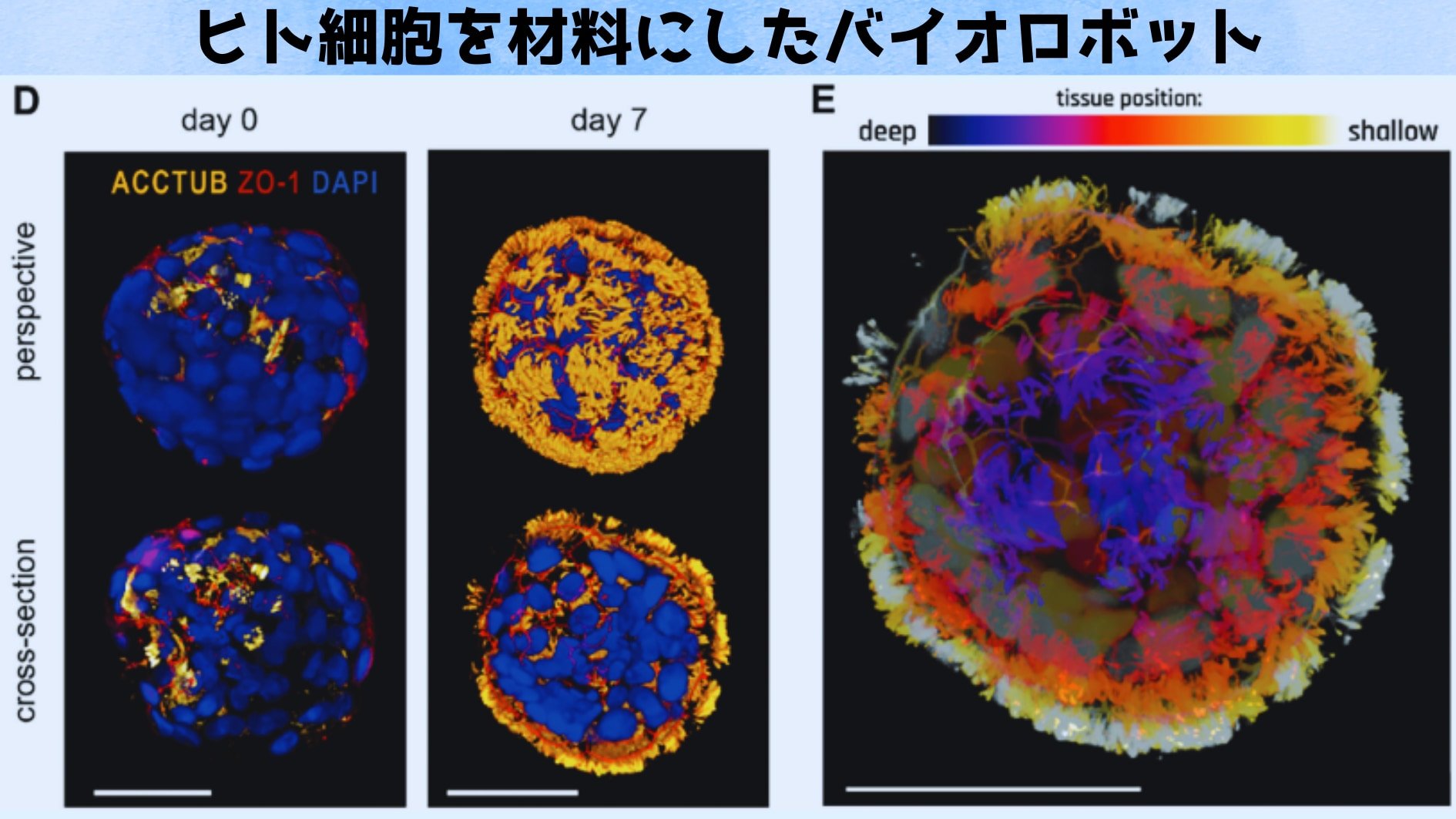
研究者たちは、350個のアンスロボットの3次元データを集め、その形や繊毛の配置について詳しく分析しました。
繊毛の配置としては、タイプ1(小さく形が滑らかで、球形に近い繊毛の分布)、タイプ2(形が不規則、繊毛が多くて全体的に均一に分布)、タイプ3(繊毛が特定の場所に集中して偏った分布)があり、全ての種類の形状についてはあまり変わらないことが分かっています。
アンスロボットの活動については、「動くもの」の中から「直線的に動くもの」と「円形に動くもの」各々をランダムに選び、各アンスロボットの左右対称性を比較しました。
結果としては、直線的に動くアンスロボット(その85%がタイプ2)は高い左右対称性を持ち、円形に動くアンスロボット(その88%がタイプ3)は左右対称性が低いことが確認されました。
後者は、タイプ3の形状から、繊毛の回転運動に偏りが生じて活動時に左右非対称性をもたらす可能性を示しています。
また、ヒトの神経細胞から作られた細胞層に幅400〜1,000ミクロンの傷を付け、その上をアンスロボットがどのように動くかを観察しました。
その結果、円運動をし、かつ動きが速いロボットの方が、直線的に動くロボットよりも傷の中でユニークな動きをし、傷全体を効果的に覆うことが分かりました。
この結果を踏まえ、アンスロボットが周囲の細胞にどのような影響を与えるのかを確認してみることにしました。
自然界では、個体が群れとして集合的に行動することで利益を生み出す「群知能」といった現象があります。
これに着想を得て、複数のアンスロボットが自然に集まって融合し、より大きな構造を形成する「スーパーロボット」を作ることにしました。
特別な型や機器を使わず、単に小さな皿の中に複数のアンスロボットを入れることで自発的に集まるようにしました。
これは、アリが体を繋げて橋を作り、広い隙間を渡る行動に似ています。
試験では、このスーパーロボットを傷ついた神経細胞層の隙間に配置し、彼らが左右の傷をまたいで「橋」のようにつなげて、傷ついた部分が修復されるかどうかを確認しました。
図Aは、スーパーロボットを配置した当日の様子ですが、上から、0日目、1日目、2日目で「橋」がつながった状態(黒っぽい部分)を示しています。
拡大した図Bでは、驚くべきことにスーパーロボットを傷の中に置いてから72時間以内に、元の組織の大幅な再生(すなわち、隙間を閉じること)が観察されました。
すなわち、「スーパーロボットの橋」のすぐ下に、傷の両側(紫色)をつなぐように「縫い目」(緑色)が形成されたのです。
但し、この隙間を閉じる現象は、スーパーロボットを配置した箇所でのみで確認され、そうでない箇所では長い傷全体を覆うような修復は見られませんでした(図C) 。

スーパーロボットが修復した傷部分の組織の密度については、元の回復状態に近いことを示しており、周囲の傷の部分とは明らかに異なっていました。
このことから、スーパーロボットが自律的に活動し、周囲の組織に対して修復や再生の能力を持っていることが明らかとなりました。























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![ピエール ダルジャン フランス 国民 洗剤 多目的 洗浄剤 ラベンダーの香り 300g 1個 フランス 国民洗剤 皮膚に優しい 天然成分 多目的洗浄剤 クリーナー剤 お風呂掃除 [並行輸入品]](https://m.media-amazon.com/images/I/51FHSlv-XWL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)