






「サーカスボール」を使った全方向バイク
私たちが普段乗る自転車やバイクのタイヤは、基本的に前後にしか移動できません。
これが当たり前のように思えますが、実は、狭い場所での方向転換や細かい操作が難しいといった問題を抱えています。

実際、工場や倉庫で使用されるフォークリフトやロボットでは、通常の車輪ではなく、全方向に動ける「オムニホイール」という技術が採用される場合があります。
このオムニホイールでは、通常の大きな車輪の外周に複数の小さなローラーを配置することで、全方向の移動を可能にしています。
では、オムニホイール以外の方法で、全方向に移動することは可能でしょうか。
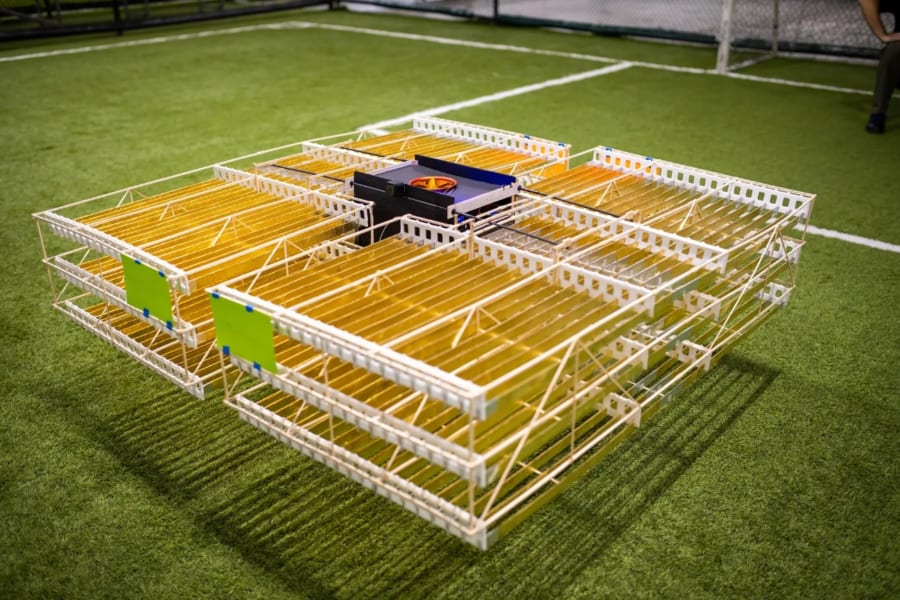
エンジニアのジェームズ・ブルトン氏は、サーカスで用いる大きなプラスチックボールをホイールとして使用するという大胆な発想にたどり着きました。

車体に装着した複数のモーターと小さなローラーでボールを回転させることで、自由自在に移動できるようにしたのです。
フレームはアルミニウム素材を用いて軽量化し、3Dプリント技術を活用して細部まで精密に作られています。
制御システムには、高速な処理が可能なTeensy 4.1マイクロコントローラーと慣性計測装置が搭載され、バランス感知や方向制御を行います。
さらに、高電圧リポバッテリーを使用することで、安定した電力供給が可能になりました。

それでも、この開発が最初からうまくいったわけではありません。
最初のテスト時には、加速時にホイールが空転し、静電気の影響で電子制御に誤作動が起きたのです。
また、高速走行中に、ホイールのゴムローラーが外れてしまうという課題も発生しました。
これらの問題を解決するため、ブルトン氏は追加のモーターを取り付けたり、ボディ全体とすべての金属部品の接地を強化するなどの改良を行いました。
その結果、より安定した走行が可能となり、スムーズに全方向移動できるようになりました。
この全方向ドリフトバイクは、まだ開発段階にありますが、すでに多くの可能性を秘めています。
例えば、都市部の狭い道や混雑したエリアでの移動手段として有用かもしれません。
また、未来の自動車やロボット工学にも応用できる可能性があります。
一方で、耐久性や安全性の向上、エネルギー効率の改善といった課題も残されており、今後の改良と発展が期待されます。
もしかすると、数十年後には「全方向バイク」が当たり前になっているかもしれませんね。

























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)

























駐車したらボールが盗まれそう
頑張りは凄いけど、バイクで横移動したいと感じたこと殆ど無いわ
ドリフトしてないじゃん。完全グリップじゃん。タイトル詐欺すぎる。というか、この記事書いた人「ドリフト」って意味、知ってる?
パワースライドとドリフトを混同してそう。
あげ足取れるオレって賢いwww
安全装置つけて転倒しないバイク
単純におもろいと思った
タイヤ次第
今のままだとお外の雨の濡れた所、マンホールなど危険ではしれない。 体育館みたいなところでは面白いと思う。競技できそう
でもこのタイヤがあったら高くつくしエコじゃ無いから屋外は不可能じゃないかな
ウンチ踏んだらフォークにあたる部分から中に入って一生着いて回りそう
こうかは ばつぐんだ!
ジャンプしたらボールすっぽ抜ける?