


タコの腕やゾウの鼻に見られる「対数螺旋」を応用したロボット触手
ロボットが物を掴むとき、どのような形状が最適なのかを考えたことがありますか。
従来のロボットアームは、関節や指を使って物を掴むのが一般的でした。
しかし、タコの腕やゾウの鼻は、それとは異なる方法で対象を掴みます。
彼らは自然界に見られる「対数螺旋」の法則に従って巻きつくことで、対象を柔軟に掴み、しっかりと保持することができるのです。
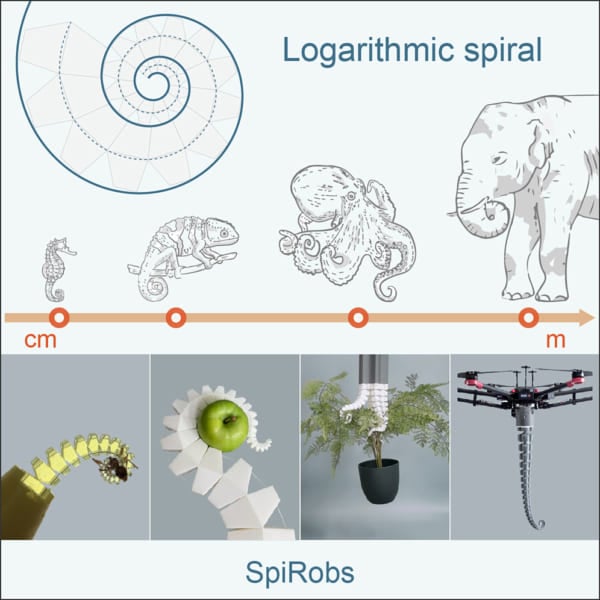
この対数螺旋は、巻貝の殻や銀河の渦、台風の構造など、自然界に広く存在するパターンです。
この形状は、最小限のエネルギーで力を伝達でき、物体への適応能力が高いのが特徴です。
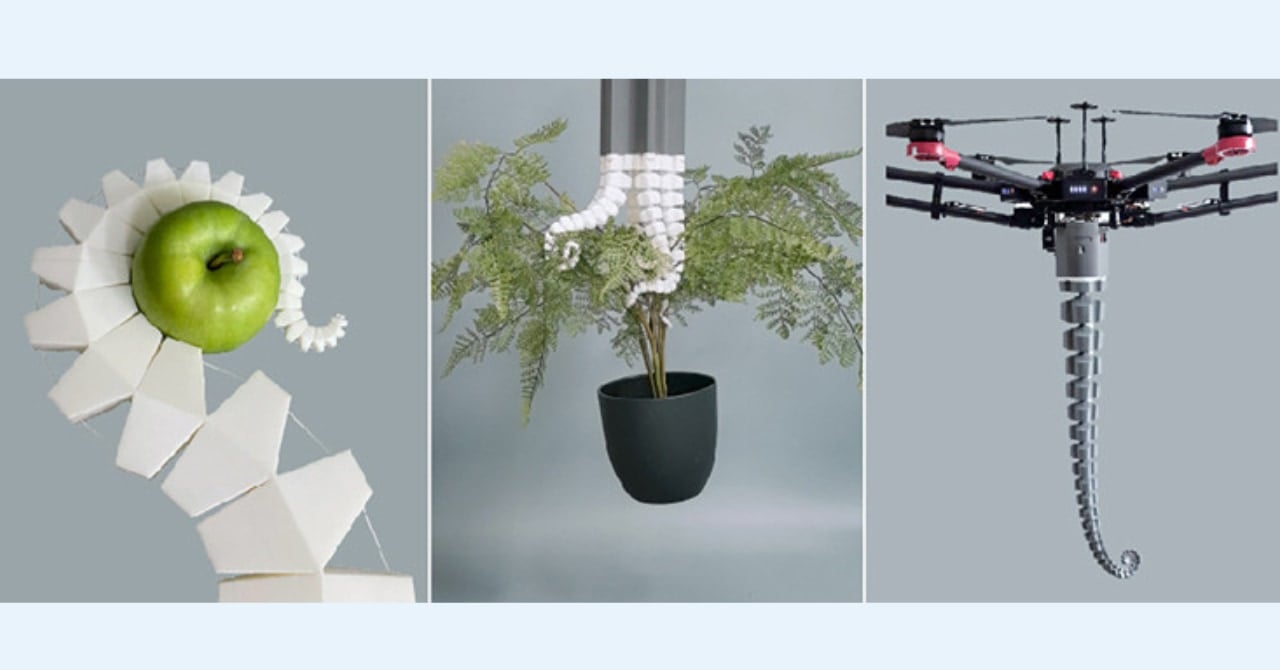
研究チームは、これらを模倣し、ロボット技術「SpiRobs」を開発しました。
SpiRobsは3Dプリンティング技術を活用して製造され、サイズは数センチから1メートル以上まで拡張可能です。
駆動方式はシンプルで、ロボット内部に通された2本または3本のケーブルを引っ張ることで、巻きついたり、解除したりする動作が可能になります。
ではSpiRobsはどのような性能を示すのでしょうか。




















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![ピエール ダルジャン フランス 国民 洗剤 多目的 洗浄剤 ラベンダーの香り 300g 1個 フランス 国民洗剤 皮膚に優しい 天然成分 多目的洗浄剤 クリーナー剤 お風呂掃除 [並行輸入品]](https://m.media-amazon.com/images/I/51FHSlv-XWL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)