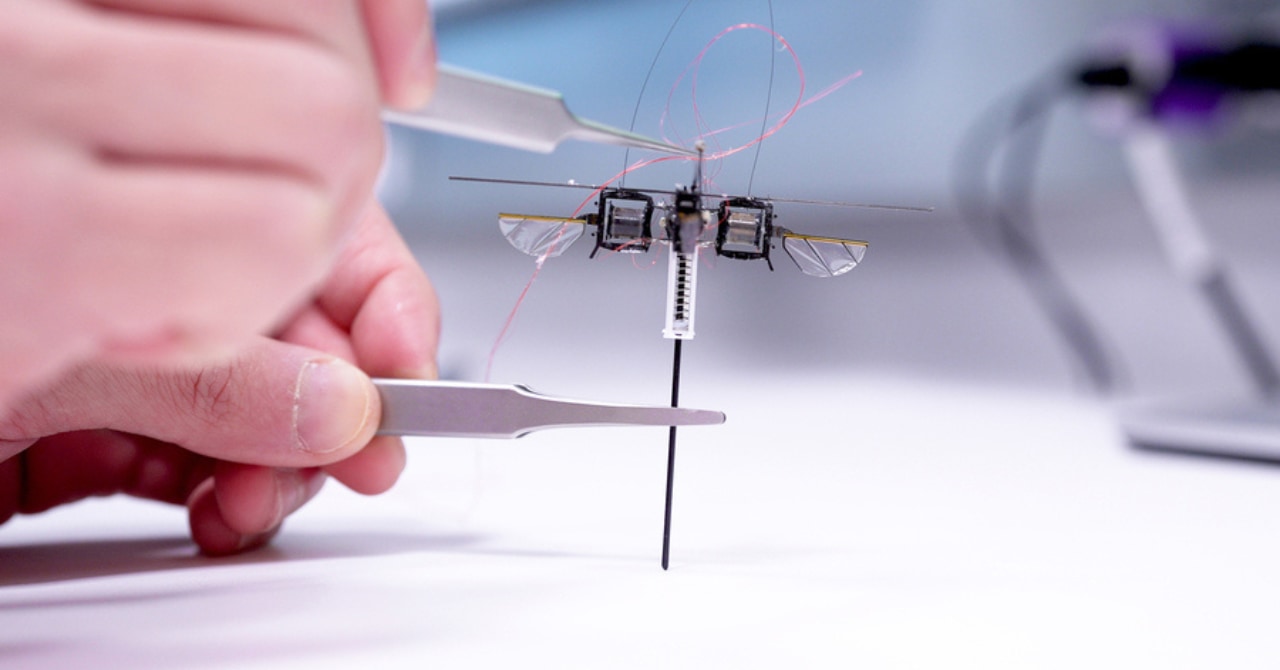



ホッピングに羽を追加!?MITが開発した新しい移動ロボットとは
このロボットの最大の特徴は、「ホッピングと羽ばたきの融合」という斬新な移動スタイルにあります。
小型ロボットにとって地上を移動する際の大敵は「摩擦」です。
足で地面を歩くには相応の出力とバランス制御が必要ですが、サイズが小さいほどそれは難しくなります。
そこで研究者たちは視点を変え、地面を歩くのではなく“跳んで飛ぶ”というアプローチを取りました。
自然界では、バッタやカエル、ノミなどが、跳んで移動しています。
MITのチームは、このような「跳ぶ生物」を模倣し、さらに昆虫のような軽い羽4枚を追加して「飛ぶ」ようにすることで、より効率的な移動を可能にしました。
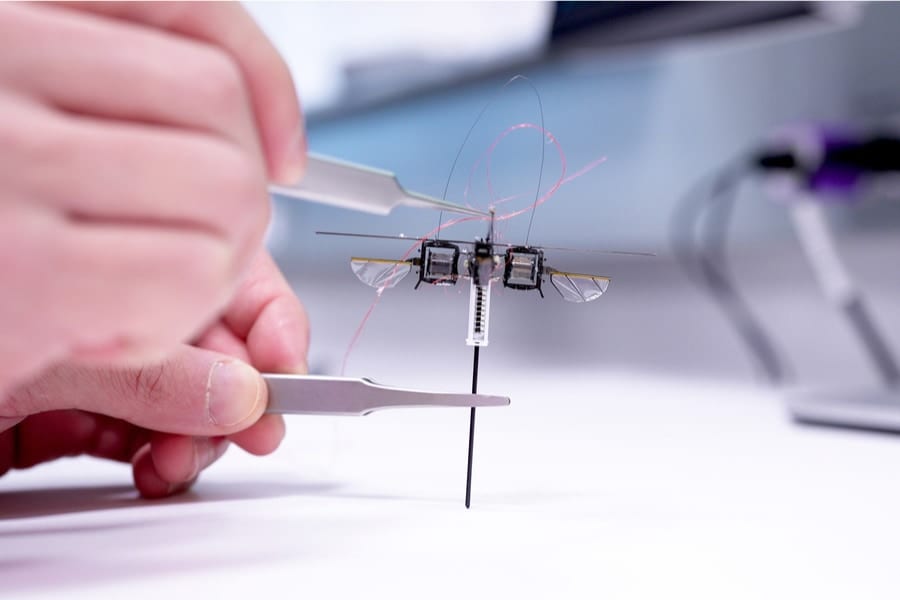
構造は無駄なものを極限まで排除しており、遊具の「ホッピング(ポゴスティック)」に小さな羽を取り付けたようなシンプルなものです。
ロボットはジャンプ後、羽を使って横方向の移動を補助できます。
そして着陸時には落下のエネルギーを利用して、再びジャンプするための力を得ます。
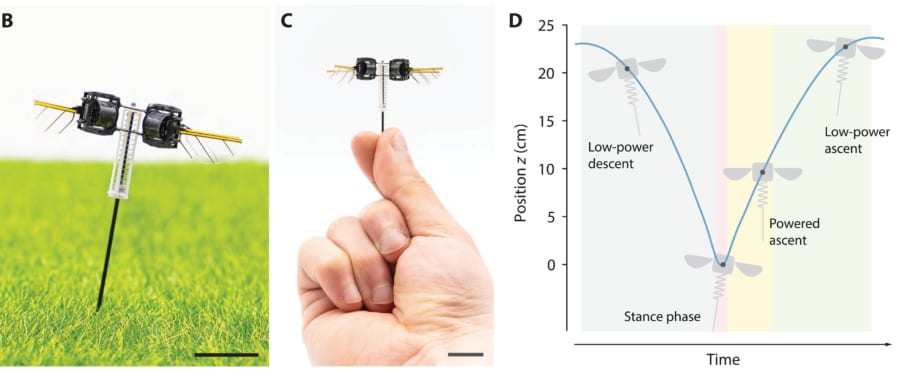
「ジャンプ → 羽ばたき → 着地 → チャージ → 再びジャンプ」というサイクルにより、エネルギーの無駄なく広範囲の移動が可能なのです。
ジャンプと羽ばたきを繰り返すこのスタイルは、エネルギー効率が極めて高く、地形の影響も受けにくいというメリットがあります。
では、「跳ぶ×飛ぶ」の組み合わせの結果、どんな能力が得られたのでしょうか。
(次項では、ロボットが実際に移動している動画を公開します)