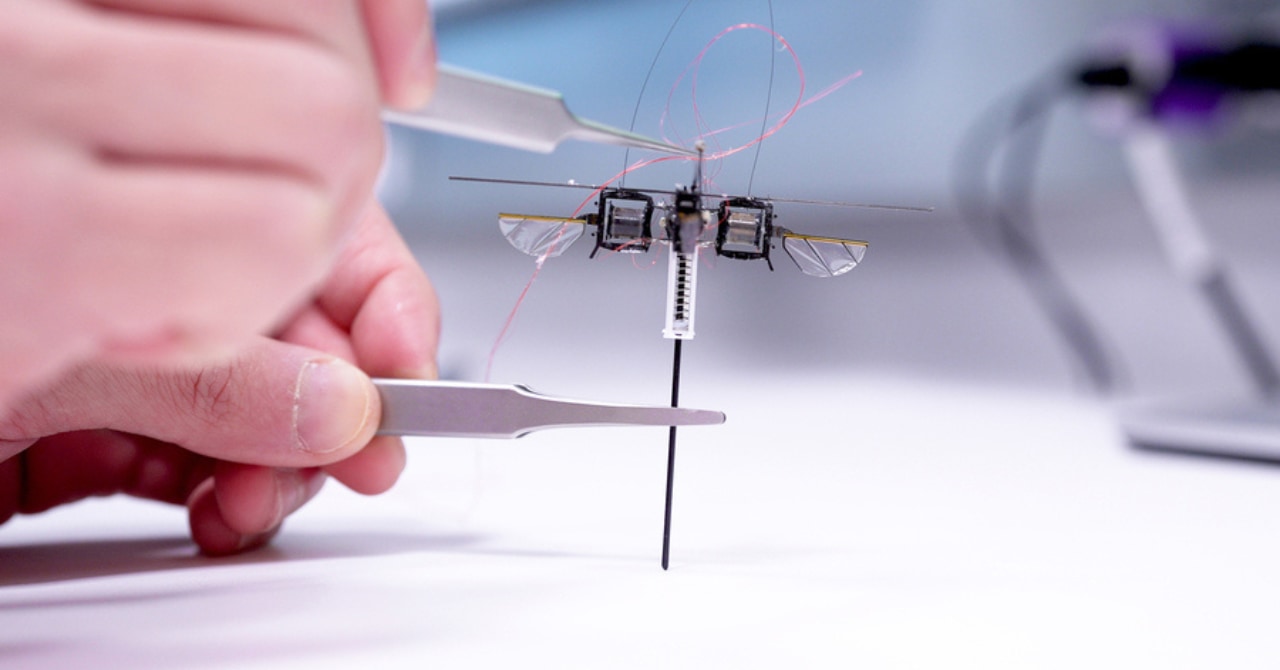
「跳ぶ×飛ぶ」で効率的な移動を実現
新しいロボットは、その独特な構造により、自身の全長の4倍の高さである20cmまで跳ぶことができます。
さらにその後は、羽も使って毎秒30cmの速度で横方向にも移動できます。
様々な地形でも問題なく移動でき、飛行型ロボットに比べて消費電力を約60%も削減できます。
さらに、エネルギー効率や耐久性に優れているため、同サイズの飛行型ロボットに比べて約10倍の重さの荷物を運ぶことさえできます。
この特徴を活かせば、倒壊した建物内部での人命捜索(狭小空間でも侵入可能)、火山や森林などGPSや電波が届きにくい環境での観測・測定、月面や火星といった重力の小さい惑星での調査・移動などで活躍するかもしれません。
もちろん、現時点では課題も存在します。
たとえば、安定した飛行制御技術や、センサー・通信機能の超小型化、バッテリー持続時間の最適化などであり、それらは今後の研究課題です。
しかしこれらの研究が進むことで、この「跳ぶ×飛ぶ」というコンセプトが小型移動ロボットの可能性を大きく広げるかもしれません。