


空陸両用ロボットの「飛行と走行のギャップ」を埋める挑戦

これまでも飛行と走行の両方をこなすロボットは存在していました。
しかしそのほとんどは、「飛行モードから着地して停止した後に変形する」「走行状態から一旦立ち止まって飛行モードに変形する」といったように、変形と移動を別々に行う必要がありました。
なぜなら、空中で機体の形を変えるという行為は、ロボットのバランスを大きく崩しやすく、非常に高度な制御技術と設計が要求されるからです。
飛行中にパーツの角度や位置が変われば、空気抵抗や推進力の方向が変わり、墜落のリスクが飛躍的に高まるのです。
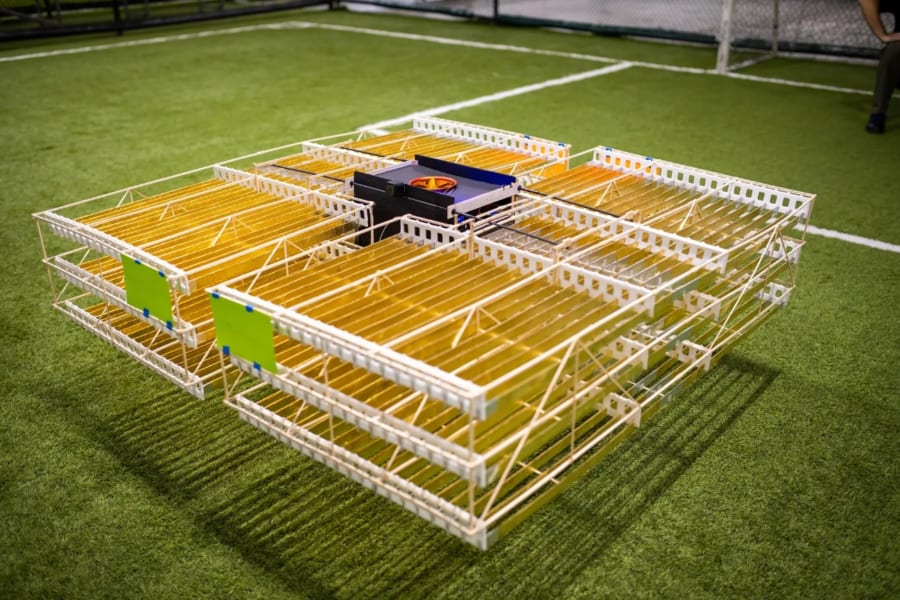
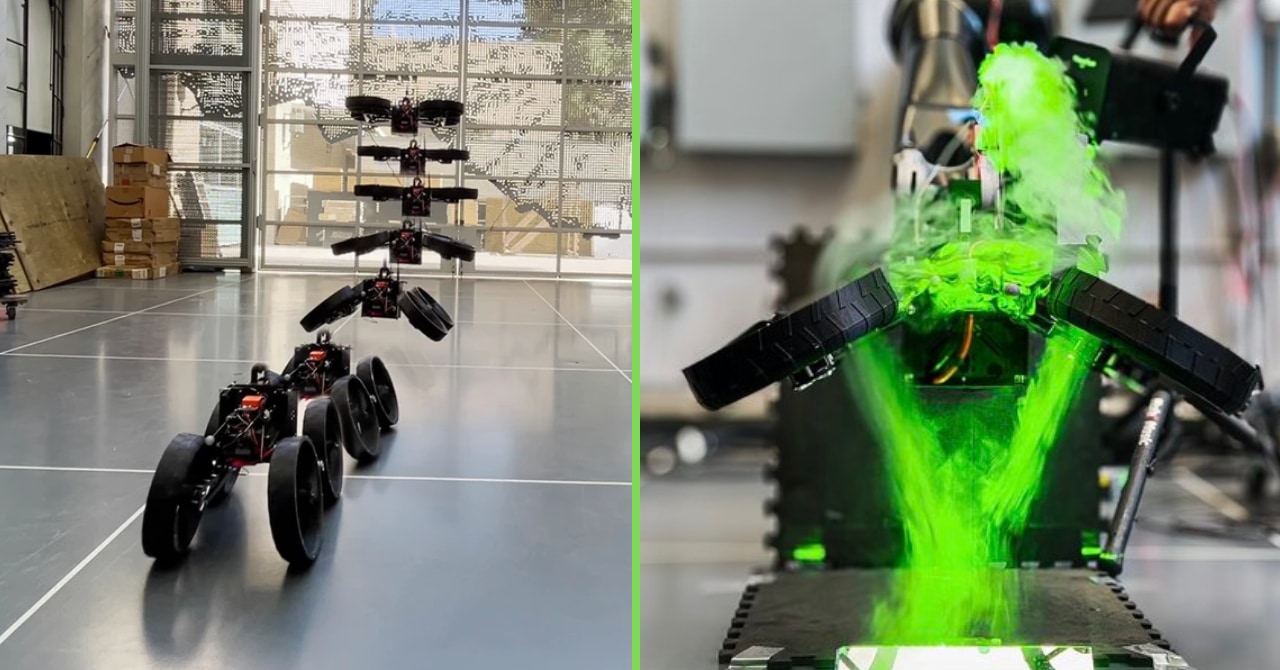
そんな中、Caltechの研究チームは、「変形しながら」走行・飛行のモードを切り替えることができるロボット「ATMO」を開発しました。
ATMOは全長約65センチ、重量約5.5キロのロボットで、4本のアームの先にはそれぞれ「車輪」と「プロペラ」が一体化された“多機能スラスター”が取り付けられています。
飛行モードでは、アームが水平に開いてクアッドコプターとして空を飛ぶことができます。
そして地上に近づくと、プロペラアームの角度を変えながら着地し、車輪として地面を走行することができます。
ATMOは一時停止せずとも「地上→空」「空→地上」とスムーズに領域を変更することが可能なのです。
では、どうしてATMOはバランスを崩さずに、空中で変形しながら、走行と飛行のモードを切り替えることができるのでしょうか?
























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)