


高度な制御アルゴリズムが「停止なしの空と陸の移行」を可能にする
ATMOが変形しながら走行から飛行へと移行できるのはどうしてでしょうか。
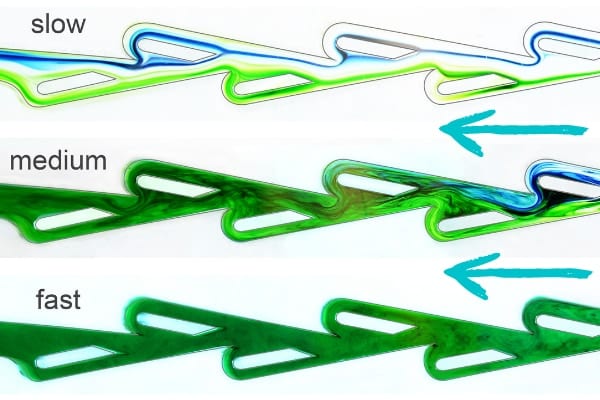
まず研究チームは、ドローンの空気力学に着目しました。
ドローンが地面に近づくと、地面で空気が反射して揚力が増すことがあり、これを「地面効果」と呼びます。
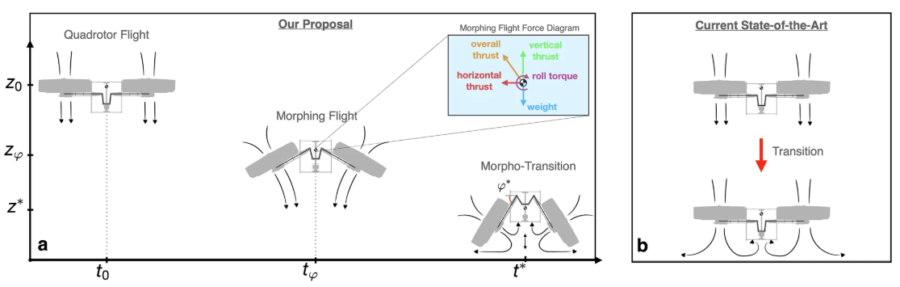
ATMOでは、「変形しながら」離着陸する必要があるので、スラスターが傾いた状態での地面効果を測定し、これを上手に制御しなければいけません。
実験では、スラスターが傾いた状態(40〜60度)で地面に近づくと、推力が最大20%増加することが分かりました。
この効果を上手く利用すれば、スラスターを限界まで傾けた状態でも、安全に着地可能になるのです。
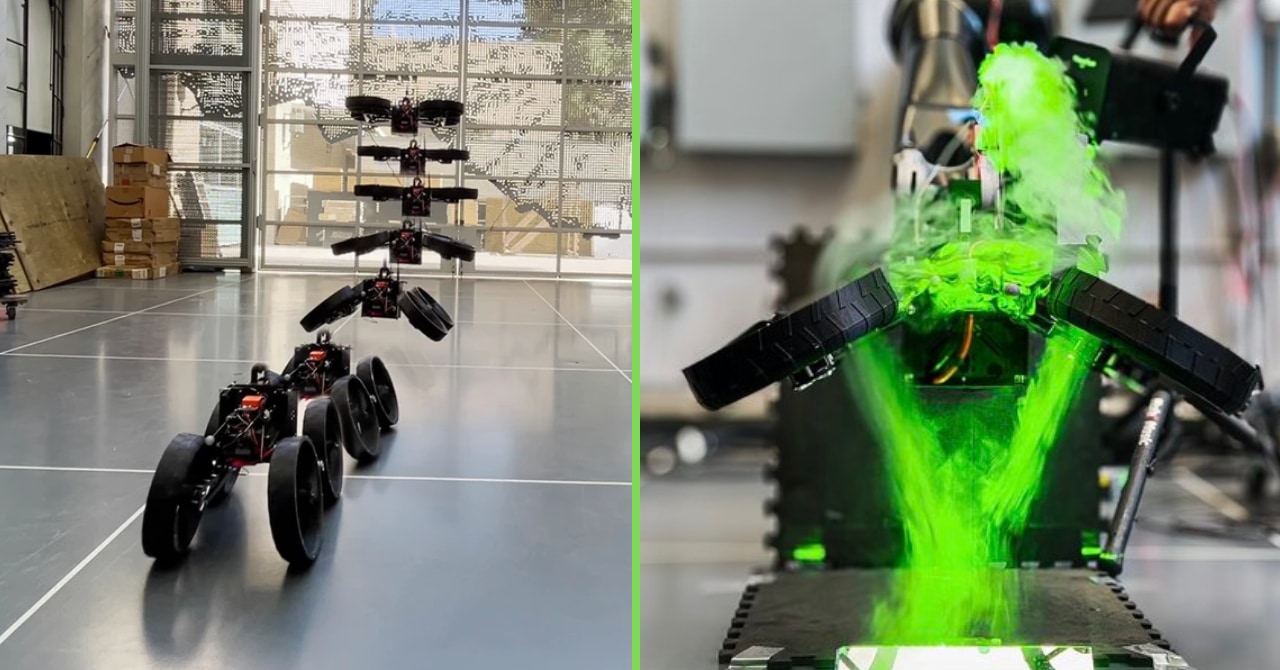
そして実際、ATMOは飛行中に最大65度までアームを傾けながら変形し、そのまま車輪モードで地面に着地。着地と同時に走行を開始することにも成功。
また、地上を走りながら飛行モードに変形し、滑らかに離陸することも可能だと分かりました。
とはいえ、ATMOの「変形しながら」の領域移行を可能にしている最大の鍵は、先進的な制御アルゴリズムにあります。
このアルゴリズムは、変化する機体の形状とスラスターの向き、さらに地面との距離をリアルタイムで考慮しながら、制御目標を柔軟に更新できます。
つまり、ATMOは「今どんな形をしていて、どれだけ推力がズレていて、どう動けば安定できるか」を常に先回りして考えて行動しているのです。
研究チームのMandralis氏は「この制御アルゴリズムこそが論文の最大の技術革新だ」と述べています。
新しい制御アルゴリズムの開発こそが、従来の技術では困難だった“前進と変形の同時進行”を可能にした最大の要因と言えるのです。
私たちがアニメで見てきた「変形しながら空と地上を行き来するロボット」は、このようにして、一歩ずつ実現していっています。




























![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)


























車輪でなければもっと良かったかなって。
出力的に仕方ないのでしょうけど見えるところにプロペラ付いてるデザインはしばらくはどうしようもないのでしょうね。
スラスターベーンとかにはならないんだろうなと。
ジョブズが生きていればidroneとかでプロペラが見えない位置についてるドローンとか作ったのでしょうけど…。
えー車輪は(車輪じゃない移動が何を想定してるかわかりませんが)移動効率いいし、飛行からの慣性でスムーズに走り出せて良くないですか
せっかく空中に行けるんだから障害物の走破性とかは度外視して良いだろうし。まあそもそも実用とかお遊びのどちらでもなく技術の実証が目的なんだろうけど
ジョブス至上主義やめーや
実際プロペラ部と車輪を別でもスムーズなはずで
変形というのはある意味無駄で
でも、変形すること自体が面白いから、それを生かした用途になるのかな
利便性とか安全性でいうと、元から走るための車輪を下につけてて、別のプロペラで高度を調整しながら
離陸、着陸のほうが普通にいいはずでは?
プロペラの角度を変える機構が変形のためだけなら、まあそれをなしにするだけで機械的にも純粋にシンプル
これの大きいのを作って、乗用できる機体できないかな。そうなるとガンダムのジープみたいだな。
ガンダムはわからんが、ロボでこれできたら楽しいよね
スコープドッグとかみたいに
他の方が書いてる通り、車輪とプロペラは別にした方が技術的にも簡単だろうしスムーズなのは確かだが、そうなると車輪もプロペラも使っていない時にはデッドウェイトになるから、軽量化する為に今回は兼用にしたのでは無いかな?
いずれにしても、このままでは空陸兼用ドローンでしか無く、軽い荷物を運ぶくらいにしか使えないから、今後どのくらいの大きさの機体を開発するつもりなのかそこが知りたい。
プロトタイプリシテア
純粋なドローンで低空飛行するのと、
走行装置ごと飛ばして車輪走行を併用するのはどっちが効率がいいのかな。
アラレちゃんに出てくるヤジロベーの車のような乗り物、空中に浮いて低空で走る車が理想なんだろうな。安全で、空気抵抗のない未来の乗りもの。
マジンガーZでも作るんか?