設計から製造までがシンプルな「ニット型ソフトロボット」

 ニット型ソフトロボット / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)
ニット型ソフトロボット / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)研究チームが新しく開発したのは、バナナのような黄色い見た目のソフト
ロボットです。
このデバイスは、黄色い「特殊ニット」と安価な「既存のゴムチューブ」で構成されています。

 開発された「特殊ニット」と空気で膨らむ既製品のゴムチューブ / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)
開発された「特殊ニット」と空気で膨らむ既製品のゴムチューブ / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)通常、ゴムチューブに空気を入れると均等に膨らみます。
しかしゴムチューブにかぶせた特殊ニットの構造によって、空気が入った時の膨らみ方(曲がる方向)を調整できるのです。
この特殊ニットは一般的なニット製品(セーター、マフラー、手袋)と製造工程が同じなため、従来のソフトロボットのような特殊な開発プロセスは必要ありません。
またデザイナーも、コンピュータ上で動きのパターンを指定するだけで、簡単に設計可能。
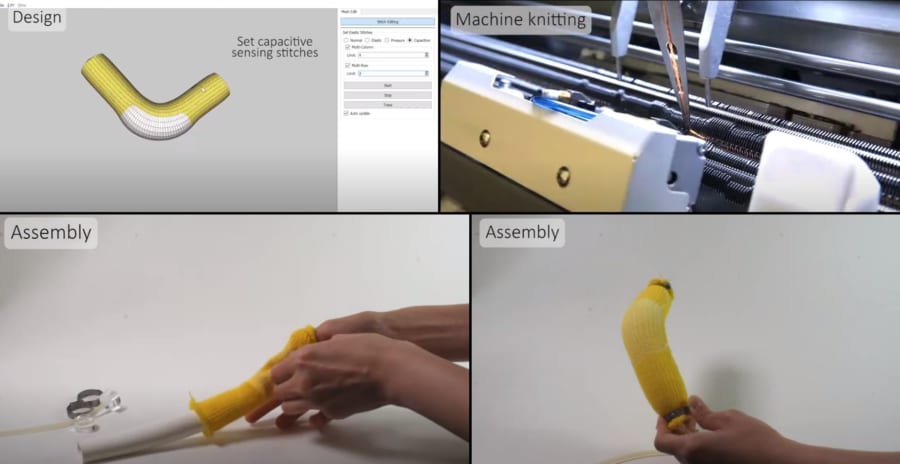
 設計から製造がシンプルで素早い / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)
設計から製造がシンプルで素早い / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)製造前にシミュレートできるため、製造と設計の試行錯誤を重ねる必要もありません。
最後は、製造した特殊ニットを既製品のゴムチューブにかぶせるだけです。
設計から製造のプロセスが非常にシンプルなのが分かりますね。
そして研究チームは、ソフトロボットのテストを複数のパターンで実施。
物をつかむロボットハンド、人間の手や腕に装着して筋力をサポートするデバイス、ウネウネと前進する4足歩行ロボットの開発に成功しました。
 ロボットハンドや四足歩行ロボットとしても利用できる / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)
ロボットハンドや四足歩行ロボットとしても利用できる / Credit:Luo Yiyue(YouTube)_[CHI2022] Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(2022)耐久性にも優れており、どの実験でも糸が切れたりほつれたりすることはありませんでした。
さらにこの特殊ニットには、センサーとして働く導電糸(電気を流す性質をもった糸)が組み込まれています。
センサーのフィードバックにより、つかみ加減を調節したり、人間の接触に反応して動作したりできるのです。
これを応用するなら、ソフトロボットに人間のような反応を与えることも可能でしょう。
とはいえ、現段階では既製品のゴムチューブを利用するため、ソフトロボットの形状が限られています。
今後チームは、さまざまな形に適応できるよう、ソフトロボットの改良に取り組む予定です。
































![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)


























