1時間の訓練で十分に使いこなせる
研究チームは24人の参加者を対象に、第3の腕(ロボットアーム)を制御する仮装シミュレーションを行いました。
ここでは両手で2本のアームを、片足のいずれかで第3のアームを操作するシチュエーションを想定しています。
実際、外科手術の現場では両手と両足で4本のロボットアームを操作するシステムが考案されています(参考動画はこちら)。
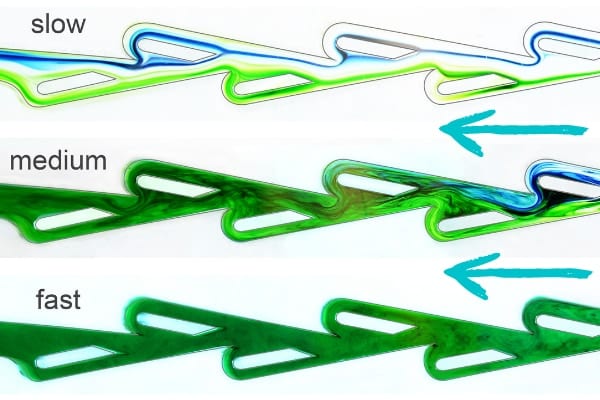
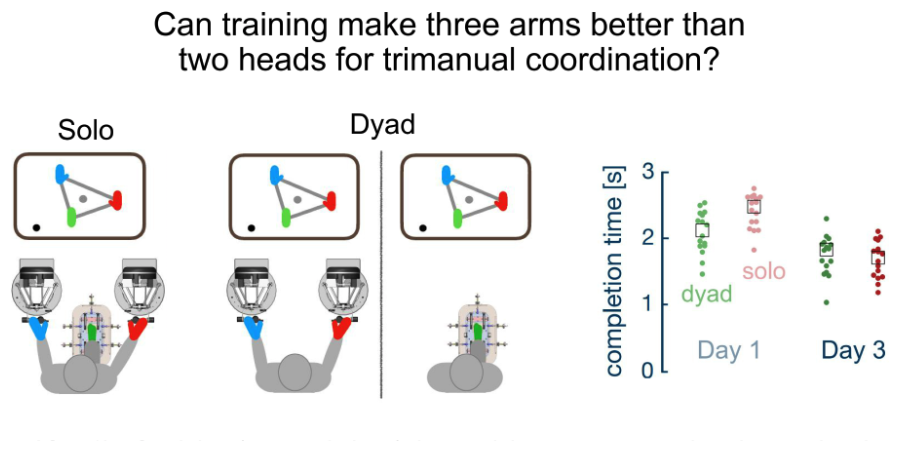
実験では3つのエフェクター(操縦機)を操作して、コンピューター上の三角形を動かすゲームに取り組んでもらいました。
三角形を動かすには左右の手と片足の動きをうまく調和させなければなりません。
参加者は、画面上のどこかにランダムに現れる黒丸マーカーに三角形の重心を3秒以内に合わせることを求められます。
また実験では、このグループの対照群として、両手のエフェクターを一人で操作し、片足のエフェクターをもう一人のパートナーに操作してもらうペア(2人1組)のグループも用意しました。
以前行われた同様のテストでは、ペア(2人1組)の方が三角形をうまく動かすことに長けていましたが、そのときは1人で3つのエフェクターを動かすグループに訓練の時間が一切与えられていませんでした。
そこで今回は、1人のグループに1回15分の訓練を3日間(最大4回の計60分間)続けてもらっています。
その結果、わずか1時間の訓練で、1人でもペア(2人1組)のグループと同じくらい効果的に第3の腕を操れるようになることが示されたのです。
イワノワ氏はこれを受けて、私たちは比較的短時間のトレーニングでロボットアームを効果的に使用できる可能性があると述べました。
ただロボットアームには、足を使って第3・第4の腕を動かす方法から、脳に電極を移植して本人の意思で動かす方法まで、さまざまなパターンがあります。
それゆえ、今回の結果をすべてのロボットアームに当てはめることはできませんが、それでもロボットアームの開発を進める上で有望な成果だとチームは話しています。