

残った腕から電気信号をロボット義肢に伝達する

義肢は失ってしまった手足を補うための最も一般的なツールとなっています。
しかし多くの義肢は手足の形を模倣するにとどまり、コントロールも難しく、当然ながら患者の意思で自由に動かすことはできません。
そこで普通の手足と同じ動きを取り戻すことを目的として開発が進められているのが「ロボット義肢」です。
ロボット義肢の制御源としては、患者の残存肢に残っている神経や筋肉が想定されています。
というのも、患者自身の意思により発生する電気信号を利用することで、義肢にどんな動きをすべきかを細かく指示することができるからです。
もしロボット義肢が単独で動くだけなら、患者の意思とは関係ない動きしかできないでしょう。
しかし残存肢から電気活動を拾い上げて、それをロボット義肢に伝達すれば、患者の思いのままに義肢を動かすことが可能です。
外科手術の手順と仕組み
そこで研究チームは、左腕の肘から先を切断した男性患者を被験者として、概念実証のための外科手術を行いました。
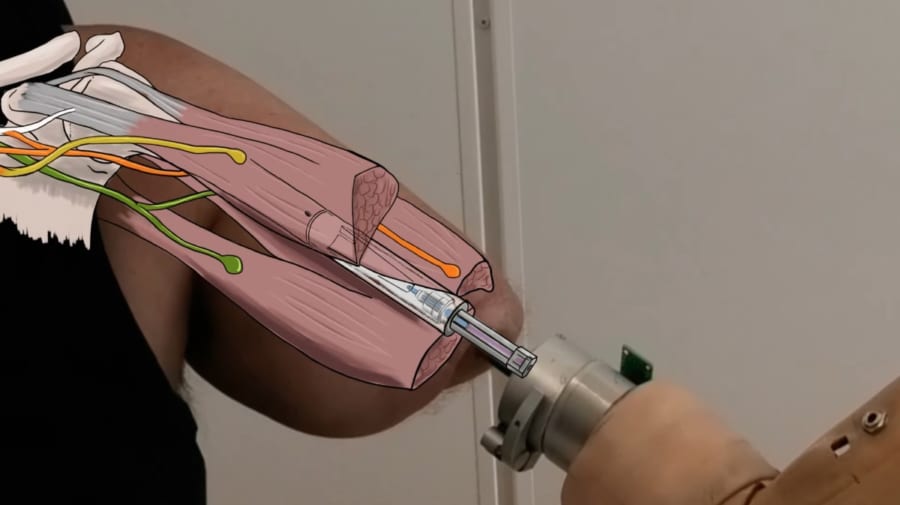
まず、残存肢に残っている電気信号を通すための神経(黄・緑・オレンジ)の末端を切除し、いくつかの神経の束に再分割します。
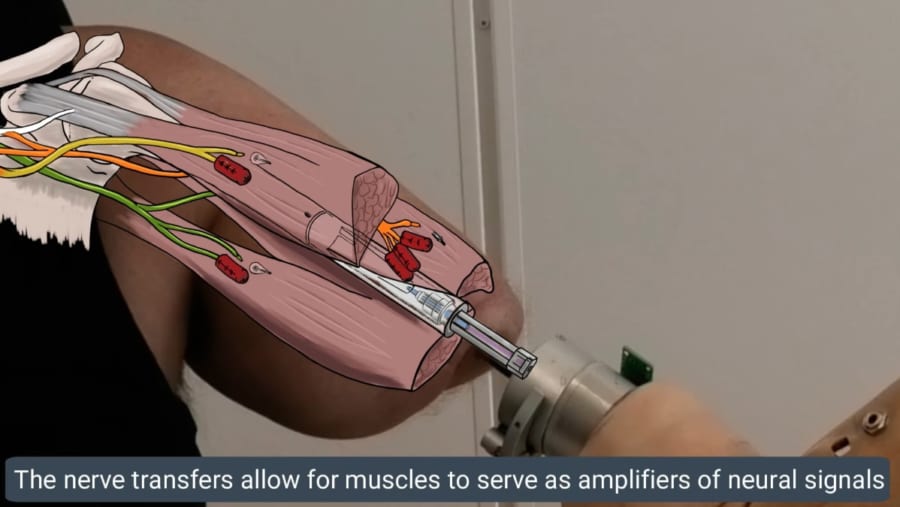
次に、神経束に電極の入ったセンサーを繋げて、受け取った電気信号を大きくする「増幅器」とします。
そして残存肢には、従来のようなソケットを介した義手の接続ではなく、残存肢の骨内にチタン製の骨格インプラントを直接的に埋め込む方法を取りました。
これを「オッセオインテグレーション(Osseointegration)」と呼びます。
オッセオインテグレーションは1952年に、スウェーデンの医師がウサギの脛骨にチタン製の顕微鏡を取り付けて、血流の観察実験をしていた際に発見されました。
医師が器具を外そうとすると、チタンと骨が強固にくっついて外せなくなり、さらに骨の組織が異物拒否反応をまったく起こしていなかったのです。
つまり、チタン骨格はソケット以上に強固かつ安定した義肢の結合方法となることが示されました。
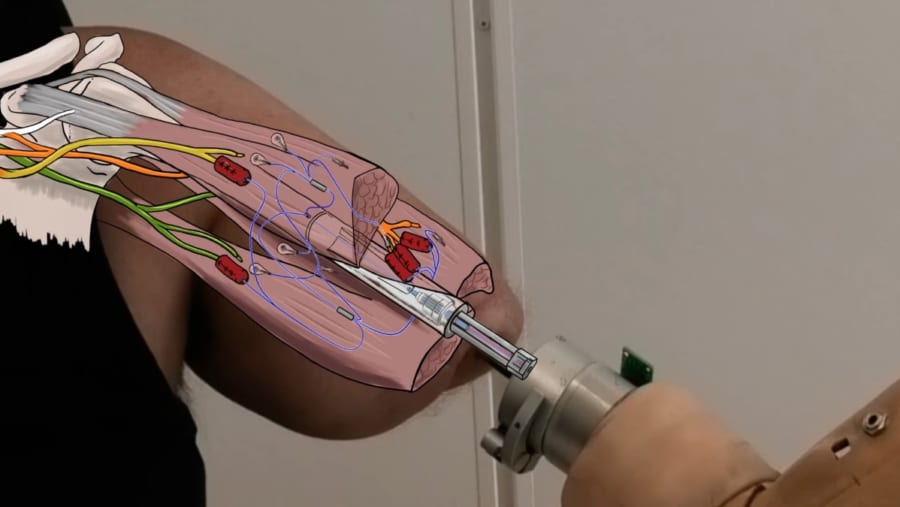
チームはこのチタン骨格にAIシステムを内蔵し、これが増幅器から送られてきた電気信号を解読して、その動きに相当する運動情報をロボット義肢に伝達します。
この外科手術は予想以上の結果を上げました。




















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![ピエール ダルジャン フランス 国民 洗剤 多目的 洗浄剤 ラベンダーの香り 300g 1個 フランス 国民洗剤 皮膚に優しい 天然成分 多目的洗浄剤 クリーナー剤 お風呂掃除 [並行輸入品]](https://m.media-amazon.com/images/I/51FHSlv-XWL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)