バイオハイブリッドハンドは疲労も再現する
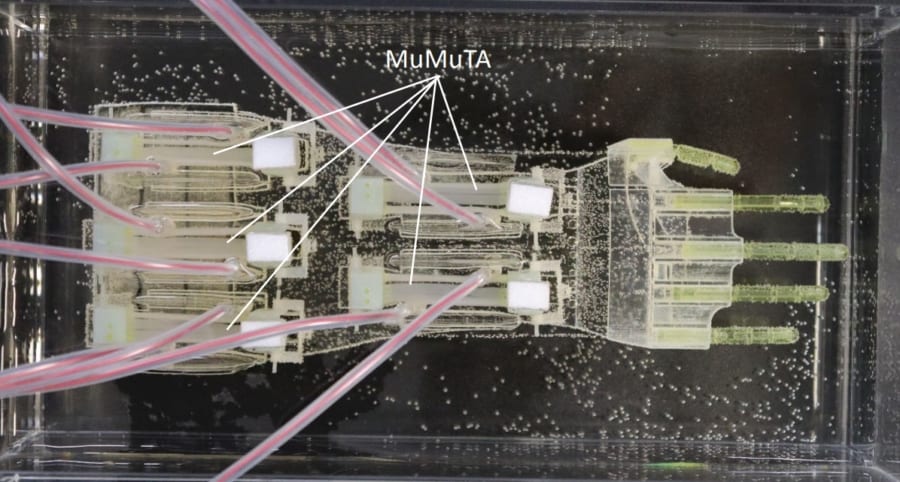
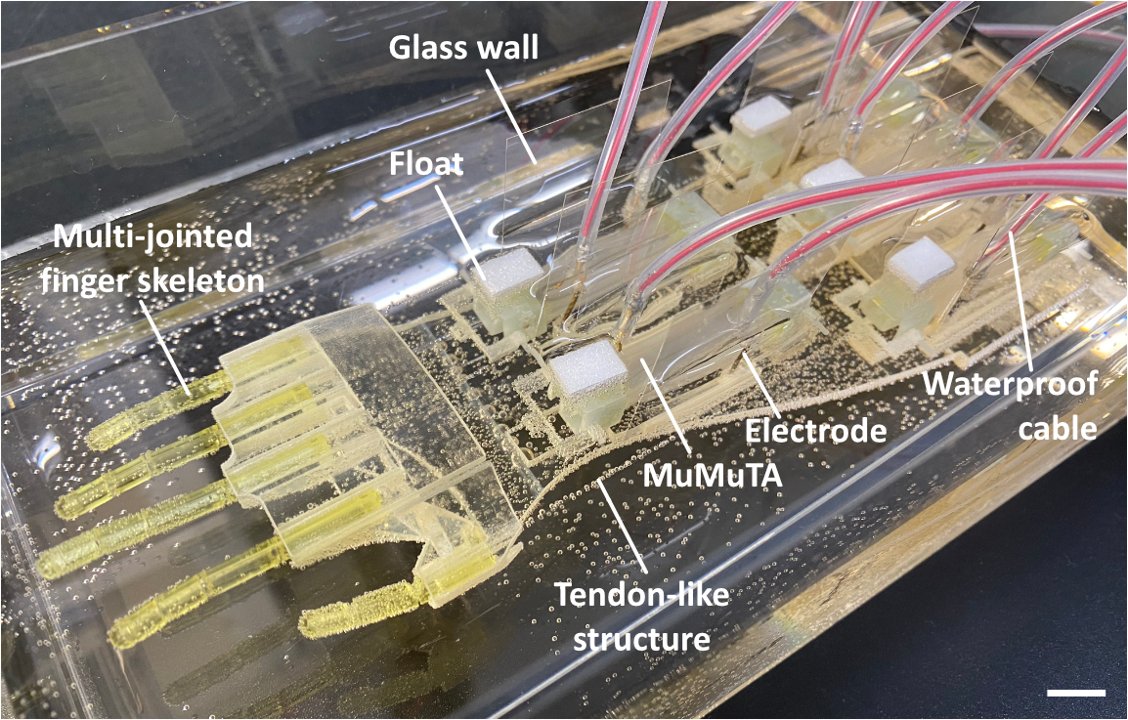
本研究の成果として生み出されたバイオハイブリッドハンドは、長さ18センチメートル、つまり人の手とほぼ同じ大きさです。
しかも、小指から親指まで5本の指をそれぞれ独立して動かせます。
たとえば、ジャンケンの“ハサミ”を作る動作をさせたい場合、小指と薬指、そして親指を曲げる一方で、人差し指と中指を伸ばしたままにするといった細やかな制御が可能です。
また、実験では、指先で小さなピペットチップをつかみ、持ち上げて移動することにも成功しました。
これは複数の関節が連動する必要がある高度な動作で、従来の小さなバイオハイブリッドロボットでは考えにくいレベルの器用さといえます。
研究チームによれば、筋肉の収縮力は約8mN(およそ0.8グラム相当の力)で、収縮率は約13%(最大で4ミリメートル程度の変位)に達しており、“生きた筋肉”ならではの高いポテンシャルが示されています。
興味深いのは、MuMuTAが私たちの筋肉と同じように“疲労”することです。
10分ほど連続で刺激を与えると、収縮力は徐々に落ちてしまいます。
しかし、1時間程度休ませると力が戻るというサイクルも確認されました。
これはまさに人間の筋肉が運動後に休息をとることで回復する仕組みに近く、“生体を使う”ならではのメリットと同時に、運用時の制約も示す結果といえます。
一方で、まだ克服すべき課題も残っています。
まず、このバイオハイブリッドハンドは現在、水中で浮かせた状態で実験されています。
筋組織に十分な栄養を供給し、乾燥や衝撃から守るためです。
今後、空気中でも安定して動かせる技術を確立する必要があります。
さらに、指を曲げた後に“元の位置に戻す”力が弱いことも指摘されています。
生物の指は、屈筋と伸筋が拮抗しあうことで曲げ伸ばしがスムーズですが、今回のハンドでは伸筋にあたる構造が充分に整っていません。
今後は拮抗筋を取り付けたり、弾性素材を使って復元力をもたせたりする改良が期待されます。




























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)