



バイオハイブリッドロボットとは何か?
バイオハイブリッドロボットとは、生物由来の組織とロボットの人工構造を融合させることで、新たな動作様式を実現しようという試みです。
たとえば筋肉や神経といった生体組織をそのまま“モーター”や“アクチュエータ”として利用し、樹脂や金属などで作られたロボット骨格と組み合わせると、従来の機械仕掛けでは得られない柔軟性や生体らしい動きが期待できます。
しかし、この分野では長らく「どの程度まで大型化し、本物の生物に近い動作を再現できるのか」という課題がありました。
多くの研究が細胞レベルで培養した筋組織を用いて、1センチメートルほどの小型ロボットを動かす程度にとどまっていたのは、筋肉を太くすれば中心部の細胞に酸素や栄養が届きにくくなり壊死が起きてしまうという深刻な問題があったからです。
しかも、単に太い筋組織を育てるだけでなく、ロボットとして機能させるにはある程度の収縮力と収縮距離を両立しなければならず、培養した筋肉をどう配置し、どのように動力伝達を行うかなど、越えねばならないハードルが数多く存在していました。
加えて、筋肉は私たちが日常的に経験しているとおり“疲労”する特性を持ち、連続して動作を行うと収縮力が落ちてしまうため、単に「筋肉を作ってロボットにはめ込めばいい」という話でもありません。
生体特有のメンテナンスや回復時間を考慮した制御が求められる一方で、そこにこそ合成素材にはない面白さや将来性があると、多くの研究者が魅力を感じてきたのです。
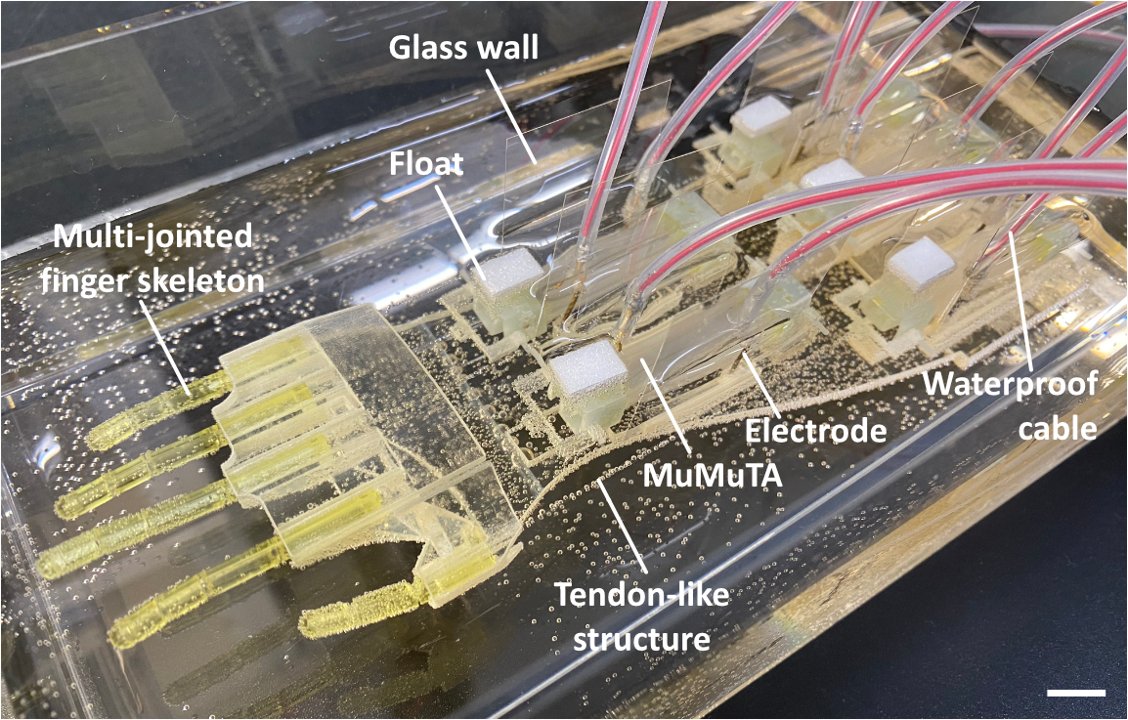
こうした背景のもと、今回の研究チームが開発したのが、複数本の細いヒト由来培養筋組織を束ねて“寿司ロール”のように巻いた「MuMuTA(多筋組織アクチュエータ:Multiple Muscle Tissue Actuators)」でした。
細い筋線維を束ねることで、中心部にも十分な酸素と栄養が行き届き、壊死を防ぎながら、全体としては高い収縮力を引き出せるという設計です。
さらに、ロボットの指関節には“ケーブル”を通すことで、筋肉が収縮した際の“まっすぐな引き力”を“関節を曲げる回転力”に変換しています。
これは人間の身体でいう“腱”のような役割を持ち、同じような発想はこれまでにも一部の小型バイオハイブリッドロボットで試みられてきました。
しかし、18センチメートルクラスの多関節ハンドを動かせるほどの筋力と収縮距離を両立した例は世界的にも珍しく、しかも5本の指を独立して制御できるという点で、従来の研究を大きく超える成果といえます。
大きな力を出せる筋肉を得るだけでもハードルが高いのに、指ごとに別々のアクチュエータを導入し、多彩な動きを実際に“再現”してみせたことは、バイオハイブリッド技術の実用化に向けた一里塚といえるでしょう。
そして何より、筋肉が長時間の動作によって疲労し、休ませると回復するという“生体らしさ”は、モーターや油圧システムでは得られないユニークな性質です。
こうした特性を上手に活かすことで、ロボットに“休みながら長期間動く”という柔軟な運用や、筋肉そのものの状態変化を使った新しい情報処理など、今までにないアイデアが生まれる可能性を秘めています。
まさにバイオとロボットの境界を越えた試みが、本格的な大型化と実用性の検討へとステップアップしたことを示す画期的な事例といえるのです。
























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)