



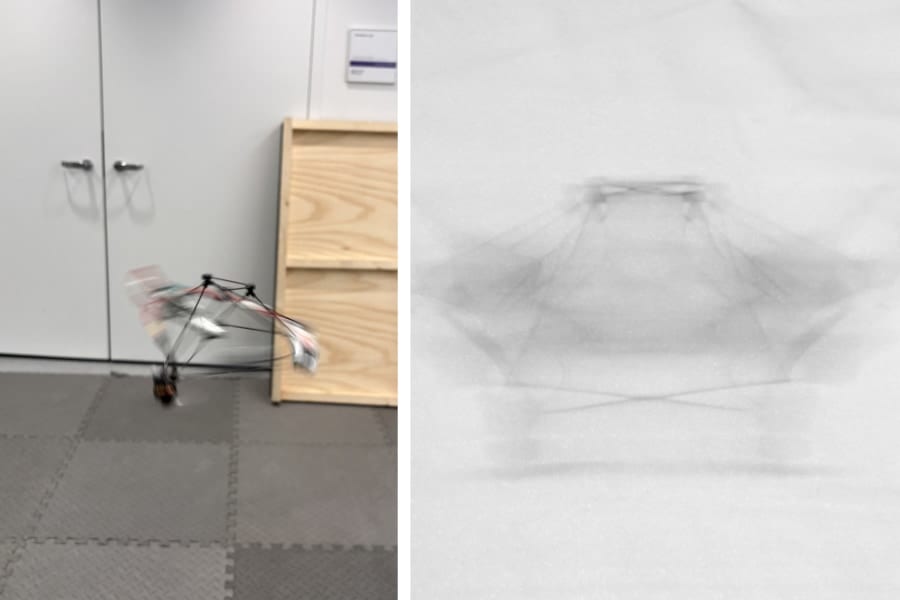
時速110kmで走る車両にピタッと着陸することに成功
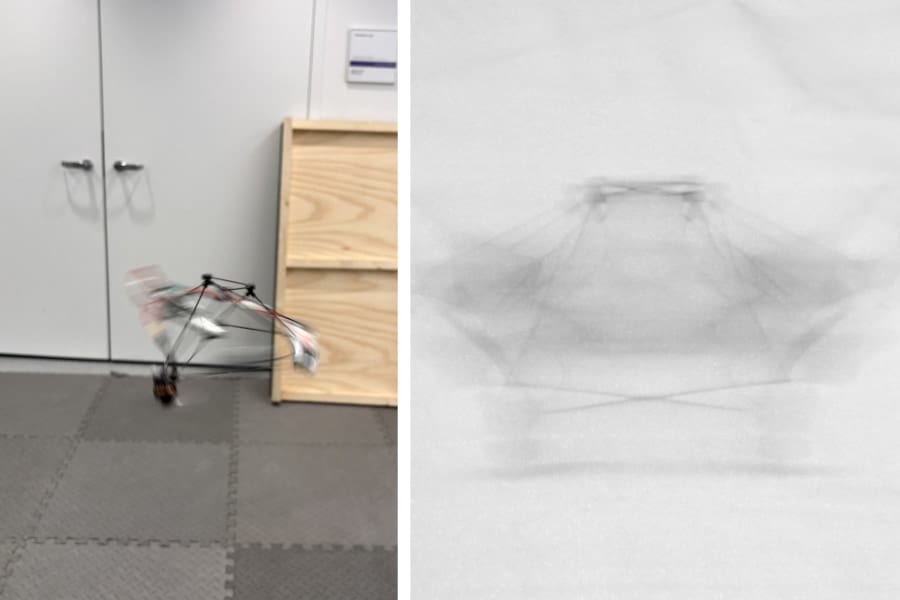
実験では、重さ2.4kgの専用ドローン(クワッドコプター)が用いられました。
そして時速10kmから110kmまで速度を変えながら、トラックの屋根に設置した特製の着陸台へ、自動制御で合計38回の着陸テストが行われました。
その結果、跳ね返りや滑り落ち、脚の破損といったトラブルは一度も発生せず、全ての着陸で100パーセントの成功を達成しました。
さらに、横風や車両の揺れ、センサーのわずかな誤差など、現実の環境下で起こりうる様々な外乱にも、この新しい着陸システムは高い耐性を示しました。
この成果によって、ドローンの回収や補給のために、わざわざ車両を停止させる必要がなくなります。
たとえば、災害現場で走行中の救援車両にドローンが物資を直接届けたり、ドローンがバッテリーを温存するために車両に「便乗」して次の現場まで移動するといった新しい運用方法が考えられます。
また、着陸のタイミングや制御の許容範囲が格段に広がったことで、高度なAIや特別なセンサーを用いなくても、現場での安全なドローン運用が現実的になりました。
さらに走行中の車両から空撮ドローンが飛び去り、車両や周囲を上空から撮影。再び戻ってくるという新たな撮影方法も可能になります。
「跳ね返らない着陸」を工学的に実現したことで、ドローン運用の自由度と信頼性が大きく向上したのです。
今後は車両だけでなく、鉄道や船舶など他の高速で移動するプラットフォームへの応用も期待されています。




























素晴らしい!
ハエみたいw
タチコマみたいにかわいい
スパイドローンとして使える
爆弾置いて帰って来れるって事なんだなこれ