運河の障害物をスキャンし学習する制御アルゴリズムを搭載

Roboat Ⅲは電気によって稼働し、搭載されたバッテリーで最大10時間の連続運航が可能。
さらにバッテリーはワイヤレス充電にも対応しています。
そしてRoboat Ⅲの自律機能は、複数のシステムによって確立されています。
まずGPSを利用することで、ある地点から目的地まで安全なルートを自律的に決定します。
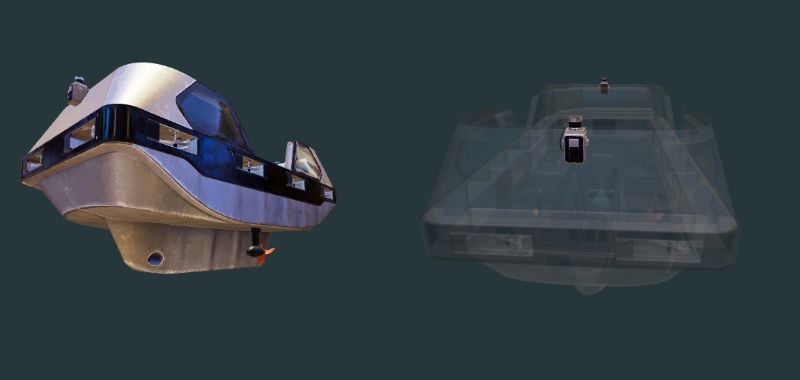
その際、橋や柱、他の船舶などとの衝突を避けるため、常に周囲をスキャンしているとのこと。
これは船体の前後に装備されたカメラ・センサーによって可能になっており、360°の視野を確保できます。
そして制御アルゴリズムはスキャンした物体を徐々に学習していくようです。
例えば、システムが新しい物体をスキャンすると、アルゴリズムはその物体に対して「unknown(不明)」というタグ付けを行います。
後日チームは、収集したデータを元に、不明タグに対して「カヌー」などと名前を付けていけるのです。
これにより安全で適用力のある自律システムが確立され、操縦士が必要なくなりました。
チームはすでに、2艘のRoboatをアムステルダムに配備しており、今後は一般利用に向けた実証実験が行われる予定です。



























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)