


外部の磁力によって、形状変化や分裂が可能に
近年、ロボット工学の分野が発展するにつれて、世界中のエンジニアが、ハードとソフトを問わず、新たなロボットの開発に取り組んでいます。
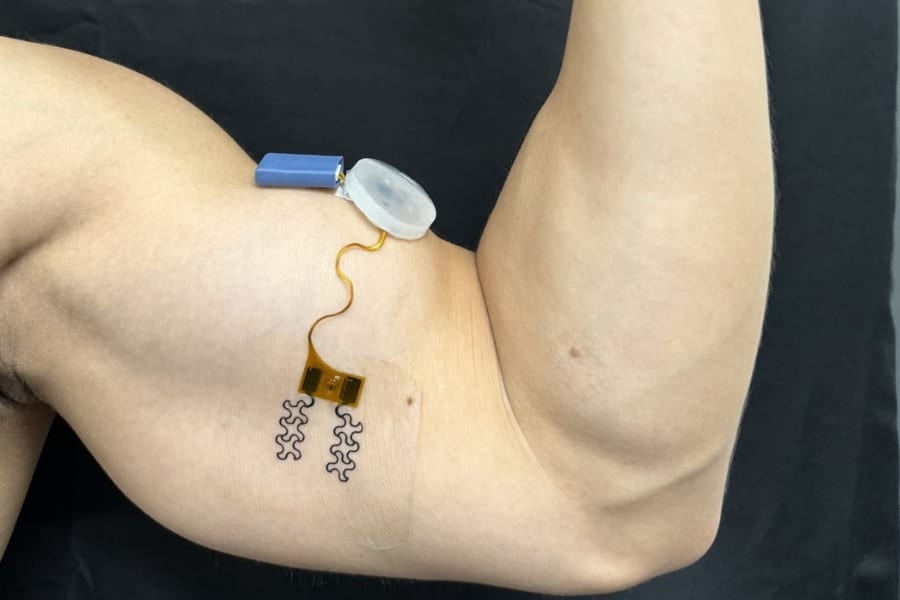
本研究チームは今回、透明なオイルに磁性酸化鉄ナノ粒子を懸濁(けんだく)させた「フェロフルイド(磁性流体)」を用いて、新たなソフトロボットを作製しました。
この磁性流体ロボは、約1センチほどの黒いスライムの様な形をしており、外部からの磁力によって動きが操作されます。
通常のハードな機械とは違い、材料が非常に緩やかにしか結合していないため、必要に応じて形状を変えることが可能です。
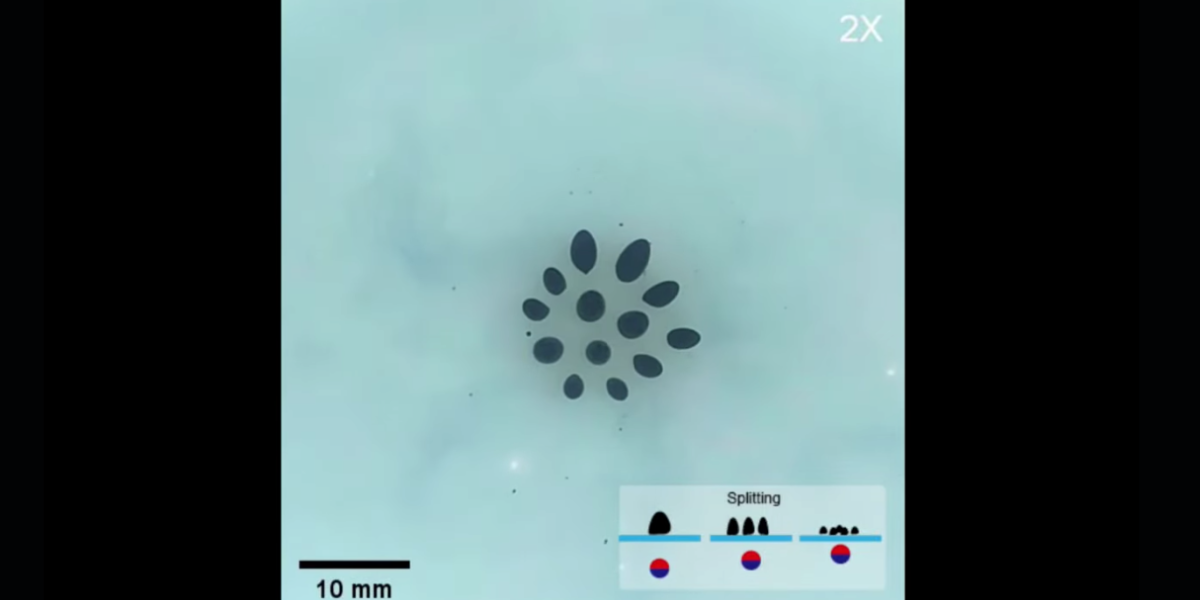
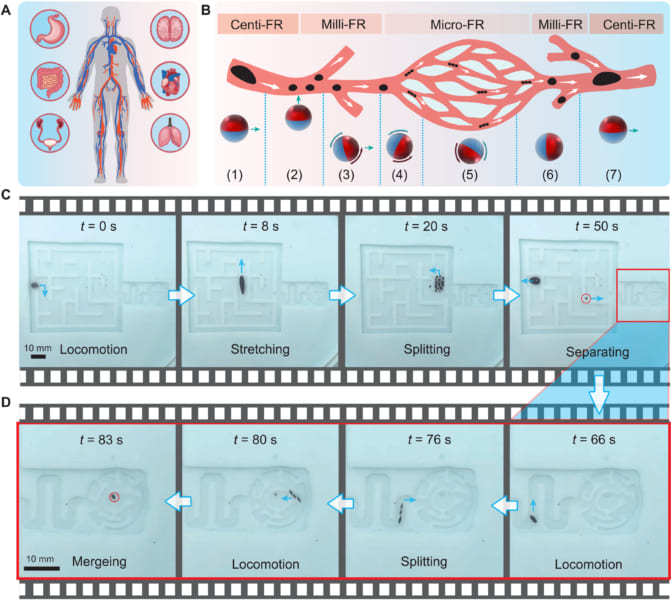
研究者によれば、1センチから、数ミリメートルあるいは数マイクロメートルのサイズまで分裂できるとのこと。
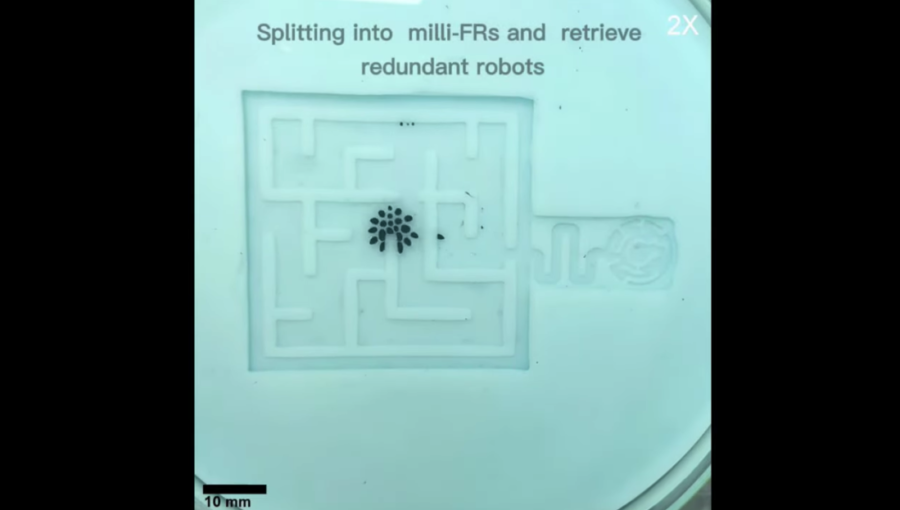
実験では、磁性流体ロボを外部の磁場によって操作することで、複雑な迷路の中を誘導し、ときには形状を変えることで、障害物を乗り越えられることも証明しました。
たとえば、狭い通路を通るときはロボットを細長くしたり、また、多孔質な素材を通過する際は、任意の小さなパーツに分裂させます。
いずれの場合も、ロボットは簡単に1つの丸い形状に戻り、その後も難なく旅を続けることができました。
また、このロボットは、用途に合わせて、さまざまなサイズで作ることができます。
磁性流体ロボは、生体への侵襲や、それに伴う物理的なダメージを最小限に抑えられるため、生体医療への応用において大きな可能性を秘めています。
具体的には、脳内や肺結節のように、従来の方法ではアクセス困難な場所に薬剤を運ぶ手段として役立つでしょう。
本研究には参加していない、英リーズ大学(University of Leeds)のピエトロ・バルダストリ(Pietro Valdastri )氏は「この技術は”ゲーム・チェンジャー”になる」と指摘します。
というのも、患者が薬剤を積んだロボットを飲み込むと、消化管の中で複数のパーツに分裂し、それぞれの目的地に応じて、必要な薬をピンポイントで届けられるようになるからです。
それ以外にも、脳卒中の原因となる脳の血栓を除去するのにも使えるかもしれません。
その一方で、実用化のためには多くの障害を克服しなければならないことも事実です。
最も明白なのは、体内に入ったロボットを外部から正確にコントロールできるような磁気制御システムの開発でしょう。
この技術が確立されないことには、ロボットは移動もできなければ、分裂、再結合もできません。
しかし、こうした課題を克服できれば、ワイヤレス医療の革新的な技術になることが期待されます。






















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)