



新しい拡張現実!?小さな虫を触って体感できるマイクロフィンガー

イヌの足、ネコの被毛、ウサギの耳などを触ったことがあるでしょうか?
「意外に柔らかい」とか「かなり弾力がある」「足の力は強い」など、感動を伴った理解が得られたはずです。
動物園での「ふれあいコーナー」で子供たちが大はしゃぎするのも、大人たちが普段得られない特別な感情を抱くのも、こうした「手で触る」ことの特性が関係しているのでしょう。
しかし触る対象があまりにも小さいと、理解や感動は減少します。
例えばダンゴムシやもっと小さなダニなどは、触ることはできても、感触や動き、力の強さを感知しづらく、結局「よく分からない」という感想になります。

では、イヌやネコを触るように、微小生物を触って感動することはできるのでしょうか?
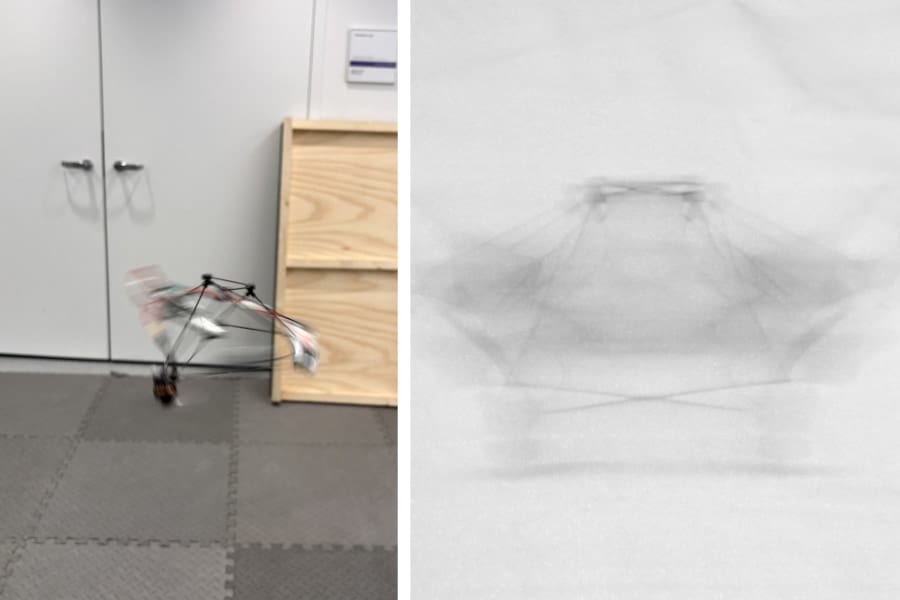
これを実現させるため、小西氏ら研究チームは、小さな虫を触るための「マイクロフィンガー」を開発し、ダンゴムシの足がマイクロフィンガーを押し返す力を計測することにしました。
微小な力を計測するための機器は、以前から存在しています。
そのため彼らの目的は、単にダンゴムシの脚力を計測することではありません。
開発した小さな手・指を、まるで自分の手・指を動かすように能動的に操作し、小さな対象を「触る」ことなのです。
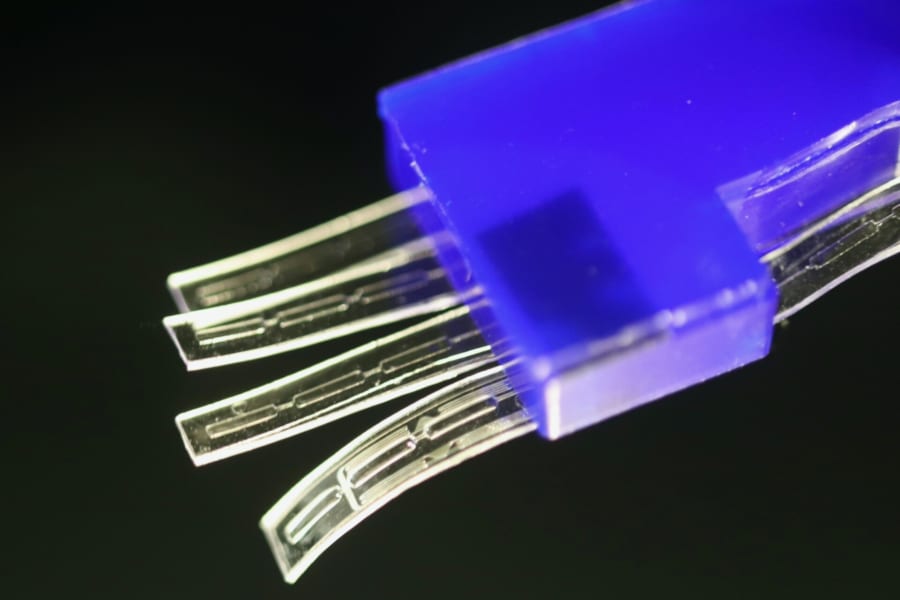
そして開発されたのは、長さ12mm、幅3mm、厚さ490μmのマイクロフィンガーです。
シリコンラバー製で柔らかく、圧力駆動の人工筋肉マイクロアクチュエータで曲げ伸ばしが可能。
また触覚センサーが内蔵されているため、触った対象の反力を計測することもできます。
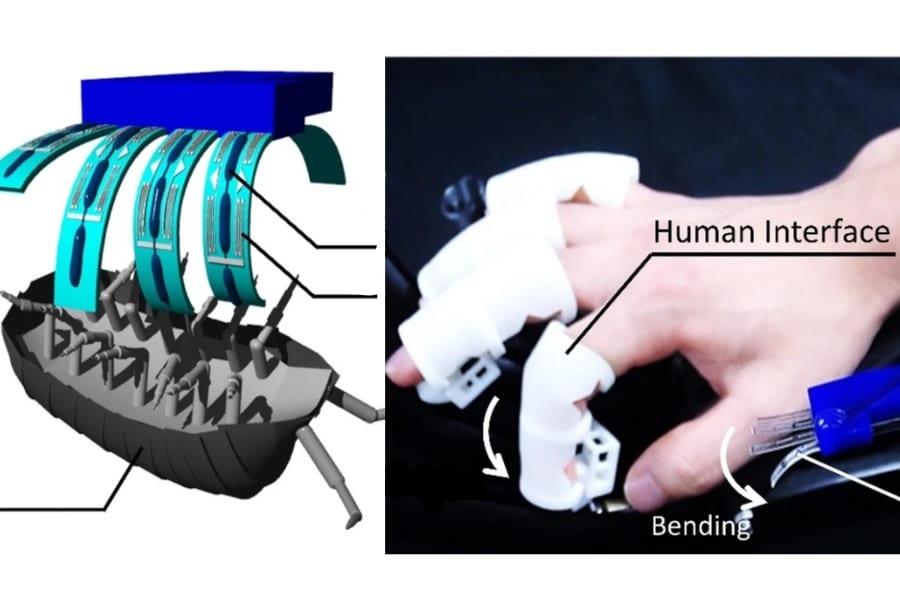
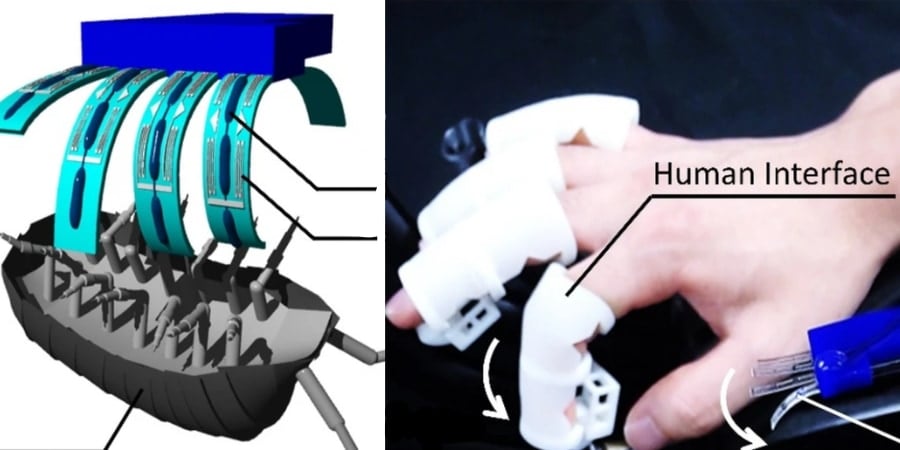
マイクロフィンガーを遠隔操作できるヒューマンインタフェースも開発されており、まるで自分の指で触るようにダンゴムシの足を触って、その力を計測できました。
この方法で得られたダンゴムシの脚力は数mN、胴体力は最大で15mNだったようです。
今回の実験では、ダンゴムシの力の程度をオペレーターにフィードバックしたわけではありません。しかし将来的には可能です。
これに拡大カメラを組み合わせるなら、「自分が小さくなってダンゴムシを触る」ような体験が得られるでしょう。
そのため今回の成果は、拡張現実技術の新たな可能性を示すものとなりました。
動物を撫でたり抱きしめたりしてはしゃぐ子供がいるように、将来的には小さな虫たちを触ったり抱きしめたりして感動する人が増えるのかもしれませんね。