



指先の血液量が変化することでグリップ力を調整していた
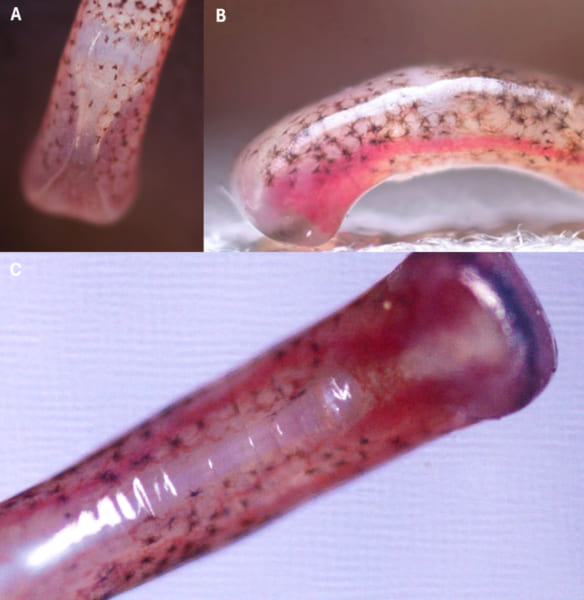
実験の結果、サンショウウオの足の指先には「血洞」と呼ばれる空間があり、そこに血液を流し込んだり排出したりすることでグリップ力を調整していることが判明しました。
具体的には、登る時に血液が減少し、指先が柔軟になって木の表面の凹凸にフィットすることで、より強固なグリップを確保できると分かりました。
この時、指先の皮膚と筋肉は柔軟性を増し、より多くの接触面積を確保することで摩擦力が最大化します。
一方で、指先が木の表面から離れる時には、血液が急激に流れ込み、血洞が拡張することで指先がわずかに膨張します。
その結果、指先の接触面積が減少することで摩擦力が低下。サンショウウオはスムーズに足を離すことができるのです。

通常、動物たちはグリップを強化するために筋力や特殊な粘着機構を使いますが、サンショウウオは逆に、足を離すときに血液を流し入れるという独特な方法を採用しています。
これは、離脱を効率化する新たな生物学的戦略であり、エネルギーの節約やスムーズな移動に寄与している可能性があります。
そして、この発見は、ロボット工学や医療技術にも応用できる可能性があります。。
例えば、クライミングロボットへの応用です。
現在のクライミングロボットは、吸盤や機械的な鉤爪を使って登攀します。
もし、サンショウウオの血液洞システムを模倣すれば、より滑らかで適応性の高いロボットを作ることができるかもしれません。
また、義手・義足に血洞のメカニズムを取り入れることで、「柔らかく持つ」「力強くつかむ」「スムーズに離す」といった動作が可能になるかもしれません。
ハイカイキノボリサンショウウオの「血流を操る力」は、きっと私たちに新たな技術をもたらすはずです。































ペタリハンドに応用されるんやろ知ってる