ランニングにおける外骨格と人間の適応能力
人間の走行を効率化する外骨格装置の開発も行われてきました。
しかし「走行の効率を上げるのは、歩行の効率を上げるよりも難しい」とされています。
研究者たちは、倒立振子モデルを応用して「バネ型外骨格」を開発してきましたが、成功例は多くありませんでした。

そんな中、イラン・テヘラン大学(University of Tehran)の研究チームが、腰に装着する「I-RUN」を開発。
曲がった金属棒がバネのように機能し、足の振りをサポートします。
これにより、ランニングに必要なエネルギーを8%軽減することに成功しました。
また2019年には、アメリカ・スタンフォード大学(Stanford University)に所属するコール・シンプソン氏らが、非常にシンプルな器具「エキソテンドン」を発表しました。
「両方の足首を1フィート(約30cm)のゴム紐でつなぐ」という方法で、ランニング時の消費エネルギーを6%軽減することに成功したのです。
そしてこの成果は、エキソテンドン利用者が器具に合わせて走り方を調整(歩数を約8%増加)することで達成されました。
つまり外骨格装置が人間の走り方に一方的に合わせるのではなく、人間の方も外骨格装置の特徴を把握し適応することで、全体的な走行効率が向上したのです。
この結果から、シンプソン氏らは「装置だけでなく、装置につながれた『ユーザー』を理解することが外骨格の可能性を引き出す」と考えています。
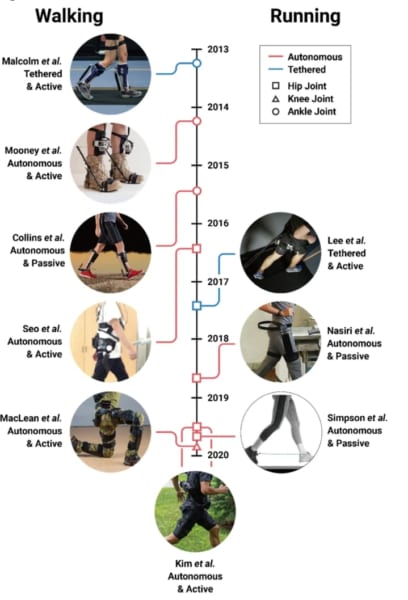
また、2020年の別の研究では、パラメーター調節可能な装置が開発され、装着者のランニングに合わせてリアルタイムで装置特性を調節しました。
その結果、15%のエネルギー節約が可能だったと報告されています。
とはいえ、この実験でも装置は電源につながっている必要がありました。
さて、このように外骨格歩行装置は、「人間の歩行理解 → モデルと装置の開発 → 装着者と装置の相互作用」という歴史をたどってきました。
本当に便利で役立つ外骨格歩行装置が開発され、普及に至るのは遠い将来かもしれません。
しかし着実に進化してきたのは事実であり、今後もこの歩行装置の分野が、文字通り一歩ずつ前進していく様を楽しみにできるでしょう。
























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)


![TFカード マイクロSDカード SD TF 512GB メモリーカード 高速データ転送 ミニSDカード SD変換アダプタ メモリケース付き 高安定性 [並行輸入品]](https://m.media-amazon.com/images/I/41HrWHxO7JL._SL500_.jpg)